کاهش درصد همانندجویی پایان نامه
شماره تماس و واتس اپ و تلگرام برای کاهش درصد شباهت : 09906118613
کاهش درصد همانندجویی پایان نامه به معنای کاهش درصد تشابه متون و محتوای یک پایان نامه با سایر منابع قبلی، از جمله پایان نامههای دیگر، مقالات علمی، کتابها و منابع الکترونیکی است. این درصد معمولاً به عنوان یک شاخص برای ارزیابی اصالت و انتشاری دستاوردهای علمی فراهم آمده در پایان نامه استفاده میشود.
کاهش درصد همانندجویی پایان نامه میتواند نشان دهنده نوآوری، انتقال دانش جدید و تلاش برای ایجاد مطالعه و تحقیق اصیل باشد. برای کاهش درصد همانندجویی پایان نامه، میتوان از روشهای زیر استفاده کرد:
-
مطالعه گسترده: قبل از شروع به نوشتن پایان نامه، مطالعه و مرور منابع مرتبط با حوزه تحقیق بسیار مهم است. این کار به شما کمک میکند تا با دستاوردهای قبلی و تحقیقات پیشین آشنا شوید و در نتیجه خطر همانندجویی را کاهش دهید.
-
استفاده از منابع معتبر: در نوشتن پایان نامه خود، از منابع معتبر و قابل اعتماد استفاده کنید. اطمینان حاصل کنید که هر گونه ادعا یا دانشی که از منابع دیگر بکار بردهاید به طور صحیح مرجعدهی شده و به طور کاملاً شفاف و شمرده در دسترس قرار گرفته است.
-
بهرهبرداری از فناوریهای ضد همانندجویی: امروزه فناوریهای متعددی برای تشخیص همانندجویی پایان نامه وجود دارد. از ابزارهای ضد پلاگیات (plagiarism) و نرم افزارهای تشخیص همانندی متن مانند Turnitin یا Grammarly استفاده کنید. این ابزارها با تحلیل و مقایسه متن پایان نامه شما با متون دیگر، احتمال همانندجویی را بررسی و اعلام میکنند.

ساز و کار ژنراتور القایی دوسو تغذیه
مقدمه:
امروزه پرکاربردترین ژنراتور جهت تولید برق از انرژی بادی ژنراتور القایی
دوسوتغذیه (DFIG) می باشد. این نوع ژنراتورها قابلیت کار با سرعت متغیر را
فراهم می کنند و مبدلهای بکار رفته در آن با درصد کمی از توان نامی توربین
بادی سر و کار دارند (حدود 30 درصد). ژنراتور القایی دوبل تغذیه از نوع
ژنراتور القایی سیم بندی شده است که هم استاتور و هم روتور آن دارای سیم
پیچی های سه فاز می باشند. علت نامگذاری این نوع ژنراتور به ژنراتور
القایی دوسوتغذیه، به خاطر انتقال الکتریکی تولیدی به شبکه از دو راه
استاتور و روتور می باشد.
شکل 1 یک توربین بادی سرعت متغیر مجهز به DFIG را نشان می دهد. در این شکل،
مدار روتور ماشین به دو مبدل و یک خازن لینک DC مجهز است. در این نوع از
ژنراتور القایی استاتور به طور مستقیم به شبکه متصل می شود در حالیکه سیم
پیچی روتور از طریق حلقه های لغزان به یک اینورتر متصل است. این اینورتر
به نحوی طراحی شده که ژنراتور القایی در یک رنج سرعت متغیر محدود شده عمل
کند. توجه می کنیم که این اینورتر خود جزئی از مبدل پشت به پشت (AC/DC/AC)
است.
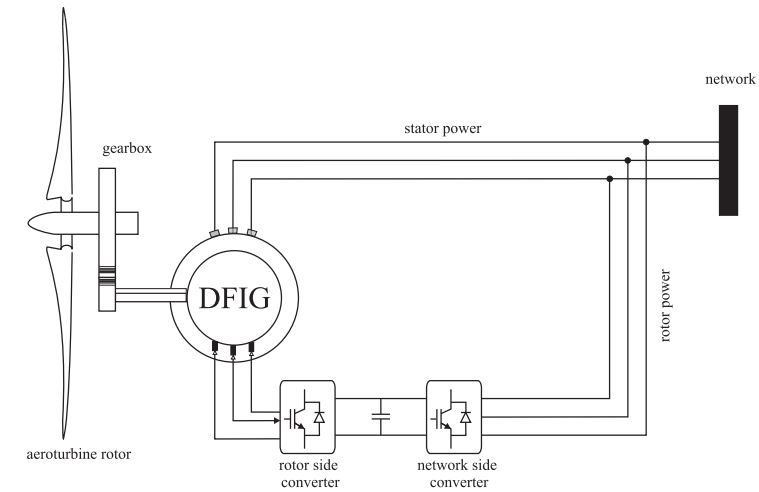
شکل 1) ژنراتور القایی دوبل تغذیه به همراه توربین بادی و مبدل پشت به پشت متصل به شبکه
مبدل
AC/DC/AC که بین سیم پیچهای روتور و شبکه قرارگرفته از دو مبدل منبع
ولتاژ VSC ، مبدل سمت روتور RSC و مبدل سمت شبکه GSC که به صورت پشت به پشت
به یکدیگر متصل اند تشکیل شده است. بین دو مبدل جهت برطرف کردن ریپل
ولتاژ و همچنین به منظور ذخیره انرژی از یک خازن استفاده می شود.
همچنین محور ژنراتور از طریق یک گیربکس به محور توربین بادی متصل است. نسبت
گیربکس به نحوی تنظیم می شود که سرعت نرمال ژنراتور القایی مطابق با
مقدار متوسط رنج سرعت روتور توربین بادی باشد. این کار برای مینیمم سازی
اندازه اینورتر انجام می شود که با رنج سرعت روتور تغییر خواهد کرد.
توربینهای
بادی انرژی جنبشی باد را به توان مکانیکی تبدیل می نمایند و این توان
مکانیکی از طریق شفت به ژنراتور انتقال پیدا کرده و در نهایت انرژی
الکتریکی تولید می شود. در این پست به طور مفصل در مورد پیشینه توربین صحبت
کردیم و در این پست نیز انواع پیکربندی توربین بادی و روشهای کنترل آن
را مورد بررسی قرار دادیم. به همین خاطر در اینجا از ذکر جزئیات در مورد
توربین خودداری کرده و شما را به صفحات مربوطه ارجاع می دهیم.
استفاده از ژنراتور القایی دوسو تغذیه به جای ژنراتورهای القایی در توربین بادی دارای مزایای زیر می باشد:
1.عملکرد با سرعت متغیر روتور در حالیکه فرکانس و دامنه ولتاژ تولید شده در مقدار ثابتی نگه داشته شده اند؛
2.بهینه سازی مقدار توان تولید شده به عنوان تابعی از مقدار باد در دسترس، نسبت به توان نامی خروجی ژنراتور؛
3.رفع مجازی تغییرات ناگهانی در گشتاور روتور و توان خروجی ژنراتور؛
4.تولید توان الکتریکی در سرعتهای پایین تر باد؛
5.کنترل ضریب توان (تولید توان راکتیو)
با توجه به توضیحات ارائه
شده و مزایای بیان شده در این نوشتار قصد داریم ضمن آشنایی با معادلات
ریاضی حاکم بر ساختار ، نحوه عملکرد و روش کنترل DFIG، یک شبیه سازی
کاربردی از آن را به همراه توربین بادی و مبدل پشت به پشت ارائه کرده و از
روش کنترل برداری کلاسیک برای کنترل مؤثر آن استفاده کنیم.
مدار معادل ژنراتور القایی دوسو تغذیه در چهارچوب مرجع سنکرون (dq)
معادلات ماشین الکتریکی در چهارچوب مرجع abc ارائه می شود اما معمولا برای
ساده سازی فرآیند کنترل این معادلات به چهارچوب های مرجع دیگری همچون
چهارچوب مرجع سنکرون یا چهارچوب مرجع ساکن منتقل می شود. در اینجا ما از
چهارچوب مرجع سنکرون یا dq0 استفاده می کنیم. بدین منظور می توان هر کدام
از بردارهای فضایی را بر اساس مؤلفه های افقی و عمودی آن بیان کرد. پس هر
کدام از سیم پیچی های فرضی توزیع شده روتور و استاتور را به صورت دو سیم
پیچ عمود بر هم همانند شکل 2 در نظر می گیریم:
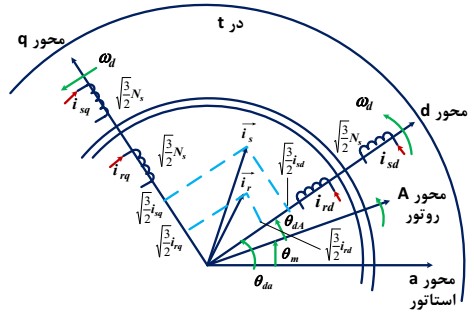
شکل 2) محورهای چرخشی استاتور و روتور در چهارچوب مرجع سنکرون
معادلات مربوط به جریانهای استاتور و روتور بر حسب جریان های سه فاز هر کدام به صورت زیر است:

در لحظه t ، محور d با زاویه θda نسبت به محور a استاتور قرار دارد.

روابط شار استاتور و روتور در چهارچوب مرجع dq به صورت زیر است:

که Ls اندوکتانس استاتور، Lr اندوکتانس روتور و Lm اندوکتانس مغناطیس
کنندگی است. معادلات ولتاژ استاتور و روتور در چهارچوب مرجع dq به صورت زیر
خواهد بود:

که Rs مقاومت استاتور، Rr مقاومت روتور، Lls اندوکتانس خودی استاتور، Llr اندوکتانس خودی روتور است. باید توجه داشت که:
همچنین در مورد پارامترهای سرعت خواهیم داشت:
که
ωd فرکانس زاویه ای سنکرون، ωm سرعت روتور بر حسب رادیان الکتریکی بر
ثانیه ، ωmech سرعت مکانیکی روتور بر حسب رادیان بر ثانیه و ωda فرکانس
زاویه ای لغزش است.
معادله مربوط به گشتاور از جمع گشتاورهای حاصل از محورهای d و q روتور حاصل
می شود:
که آنرا می توان به یکی از دو صورت زیر بدست آورد:
و معادله الکترودینامیکی ماشین القایی به صورت زیر نمایش داده می شود:
که J اینرسی معادل ژنراتور و B ضریب ویسکوز است. در نهایت مدار
معادل ماشین القایی در چهارچوب مرجع dq به صورت شکل 3 می باشد. در این شکل
همه متغیرها و پارامترهای الکتریکی به سمت استاتور رجوع داده شده اند.
توجه می کنیم که همه کمیتهای استاتور و روتور در چهارچوب مرجع چرخشی
سنکرون (چهارچوب dq ) هستند.

شکل 3) مدار معادل DFIG در چهارچوب مرجع سنکرون dq
مبدل پشت به پشت برای کنترل DFIG :
مبدل فوق از دو مبدل سمت روتور (RSC) و مبدل سمت شبکه (GSC) تشکیل شده که
از سمت DC توسط یک خازن به یکدیگر متصل هستند. وظیفه این مبدل، تبدیل
فرکانس می باشد؛ به طوریکه ولتاژ متناوب با فرکانس مشخص ابتدا به ولتاژ
مستقیم تبدیل شده و سپس مجدداً به ولتاژ متناوب با فرکانس مطلوب تبدیل می
گردد. با استفاده از روش کنترل مناسب، مبدل پشت به پشت قادر است تبدیل
فرکانس را از هر دو طرف انجام دهد.
دو مبدل فوق یکی به صورت اینورتر و دیگری به صورت یکسو کننده عمل می کند
که توسط یک لینک DC بهم متصل هستند. مبدلی که به ژنراتور متصل است، مبدل
سمت روتور (RSC) و مبدلی که به شبکه متصل است، مبدل سمت شبکه (GSC) نامیده
می شود. هر یک از این دو مبدل سه فاز، می تواند دو نقش یکسوسازی و
اینورتری را انجام دهد.
هنگامی که سرعت ژنراتور کمتر از سرعت سنکرون است، جریان توان از سمت شبکه
به سمت روتور می باشد و لذا GSC نقش یکسوکننده و RSC نقش اینورتر را ایفا
می کند. در شرایطی که سرعت ژنراتور بیشتر از سرعت سنکرون است، جریان توان
از سمت روتور به سمت شبکه می باشد و لذا RSC نقش یکسو کننده و GSC نقش
اینورتر را ایفا می کند. نحوه عملکرد سیستم و کنترل پالسهای اینورترها
توسط سیستم کنترلی اصلی مجموعه انجام می شود.
مدل توربین بادی مبتنی بر DFIG
مدل ژنراتور القایی دوبل تغذیه شامل قسمتهای مکانیکی، الکتریکی و مبدل
همراه با کنترل کننده است که در مجموع انرژی مکانیکی را از باد به انرژی
الکتریکی تبدیل می کند و سپس آن را به شبکه توان تزریق می کند.
الف)
مدل قسمت مکانیکی
قسمت مکانیکی DFIG شامل تجهیزاتی است که در معرض تیغه های توربین بادی و
مکانیزم فیزیکی آن قرار دارند و آن را هدایت می کنند (قطار درایو یا
گیربکس). با حضور باد با سرعت Vw، توان مکانیکی Pm تولید می شود که روتور
ژنراتور را هدایت میکند. قسمت مکانیکی می تواند بوسیله معادلات زیر شرح
داده شود:
![]()
که Tm گشتاور مکانیکی، چگالی هوا، A مساحت جاروب شده توسط تیغه توربین در
زمانی است که می چرخد و Cp ضریب توان مکانیکی است که می تواند به صورت
زیر محاسبه شود:
که λ نسبت رأس تیغه، R شعاع تیغه، λr متغیر مربوط به نوک تیغه میانی، ß
زاویه گام تیغه توربین و مقدارهای Ci (i=1:8 ) ثابتهای توربین هستند.
قانون علامت به گونه ای اتخاذ می شود که وقتی DFIG در حال تولید برق به
شبکه است (یعنی مد ژنراتوری) ، Tm منفی است، در حالیکه زمانی که آن توان
مصرف می کند (مد موتوری) Tm مثبت است.
با درنظر گرفتن یک مدل دو جرمه از قطار درایو، معادله زیر رابطه بین سرعت
روتور ، گشتاور مکانیکی Tm و گشتاور الکتریکی Te را نشان می دهد که مقدار
گشتاور الکتریکی در قسمت مربوط به بخش الکتریکی معرفی و محاسبه خواهد شد:
که
H اینرسی ژنراتور و F ضریب ویسکوز است. کنترل کننده زاویه گام همچنین بر
اساس سرعت روتور جهت حفاظت از گیرهای انتقال و ژنراتور القایی در نظر گرفته
می شود. یک کنترل کننده تناسبی برای زاویه گام در نظر گرفته می شود که
به صورت زیر است:
که ωd سرعت زاویه ای بیشینه است.
ب) قسمت الکتریکی
قسمت الکتریکی DFIG اساسا از ژنراتور القایی تشکیل شده است که توان
الکتریکی Pe و گشتاور الکتریکی Te در آن از تبدیل توان مکانیکی بدست می
آیند که آن نیز از توان بادی در مکانیزم توربین بادی استخراج می شود.
معادلات مربوط به قسمت الکتریکی و مدار معادل قبلا برای این قسمت توضیح
داده شده است.
قبل از پرداختن به قست کنترل مبدل ها، بهتر است به بررسی مختصر انواع روش
های کنترل DFIG بپردازیم.
روش های کنترلی DFIG :
سیستم کنترلی به همراه مدولاتور وظیفه تولید پالس کلیدهای مبدل مطابق با
مرجع مطلوب را بر عهده دارد. سه مورد از پرکاربردترین روشهای کنترل DFIG
شامل کنترل جهت دهی میدان (FOC)، کنترل مستقیم گشتاور (DTC) و کنترل
مستقیم توان (DPC) می شود.
روش مرسوم و کلاسیک کنترل برداری توانایی کنترل مستقل توان اکتیو و راکتیو
ژنراتور را فراهم می کند. این شیوه کنترلی بر پایه متغیرها در دستگاه مرجع
سنکرون است. روش کنترل برداری بر اساس تبدیل مدل سه فاز موتور القایی به
مدل دو سیم پیچ عمود بر هم و کنترل جریان این دو سیم پیچی بنا شده است.
این تبدیل به صورت تبدیل مدل سه فاز به مدل دو فاز dg دوار است. می توان
با جهت دهی مناسب شار، گشتاور را با مؤلفه عمودی جریان استاتور در دستگاه
dq یعنی iqs و مقدار شار را با مؤلفه افقی جریان استاتور در دستگاه dq ،
یعنی ids کنترل کرد. در قسمت شبیه سازی از روش کنترل جهت یابی میدان برای
فرآیند کنترل استفاده شده است.
کنترل مبدل ها
قسمت کنترل کننده – مبدل DFIG شامل کنترل کننده سمت روتور (RSC) و کنترل
کننده سمت شبکه (GSC) هستند که هر یک از تعدادی کنترل کننده PI تشکیل شده
و از طریق یک خازنی که لینک DC نامیده می شود، به هم وصل شده اند. در
حقیقت مبدلهای فرکانسی با مقادیر نامی کامل برای اتصال AC/DC/AC
ژنراتورهای توربین بادی به شبکه توان در این مکانیزم حضور دارند که تبدیل
سرعت را از سرعت روتور توربین بادی به فرکانس نامی شبکه بین گیربکس و مبدل
فرکانسی تسهیم می کنند. این منجر به کاهش تلفات کلی توان ایجاد شده با
تبدیل سرعت مکانیکی می شود. هدف GSC حفظ ولتاژ لینک DC در یک مقدار ثابت
صرفنظر از دامنه و جهت توان روتور است.
برای ایجاد کنترل مستقل توان اکتیو و راکتیو شارش شده بین شبکه و GSC، این
طرح کنترلی در چهارچوب مرجع ولتاژ استاتور انجام می شود. از طرف دیگر RSC
در چهارچوب شار متقابل برای بدست آوردن کنترل توان اکتیو و راکتیو می
باشد.
هدف کنترل توان این است که توان مکانیکی تولید شده توسط
توربین، مشخصه توان – سرعت خودش را دنبال کند و کنترل توان راکتیو بوسیله
تنظیم جریان راکتیو شارش شده در RSC بدست می آید. قانون تبدیل انرژی با
معادله زیر برای لینک DC ارائه می شود:
کنترل مبدل سمت
روتور:
این مبدل برای کنترل گشتاور DFIG از کنترل مستقیم جریان روتور استفاده می
کند. RSC این کار را با اعمال ولتاژ مناسب به سیم پیچ روتور انجام می دهد.
RSC تحت فرکانس های متغیر متناظر با تغییرات سرعت روتور که متناسب با
سرعت باد است، عمل می کند تا حداکثر توان از باد استحصال شود. همچنین در
عملکرد عادی، RSC توان راکتیو را برای روتور فراهم و بدین ترتیب ضریب توان
شبکه را کنترل می کند. این توان راکتیو باید از طریق استاتور که به شبکه
متصل است، فراهم گردد.
مبدل سمت روتور می تواند از یکی از کنترل کننده های گشتاور، سرعت و یا
کنترل کننده توان راکتیو برای تنظیم توان خروجی DFIG استفاده کند. به طور
معمول از یک کنترل کننده PI برای کنترل گشتاور، سرعت و یا توان استفاده می
شود. هر کدام از کنترل کننده ها که استفاده شود، می تواند خروجی مقدار
مرجع جریان روتور، گشتاور توان و سرعت خواسته شده را فراهم کند. سپس از یک
کنترل کننده PI دیگر برای کنترل خطای جریان روتور از مقدار مرجع استفاده
می شود. جریان روتور همچنین می تواند برای کنترل توان راکتیو تولیدی
ژنراتور استفاده شود. طرح کنترل RSC در روش کنترل برداری مرسوم در شکل 4
نمایش داده شده است. طرح کنترلی RSC در چهارچوب شار متقابل برای بدست
آوردن کنترل توان اکتیو و راکتیو می باشد.
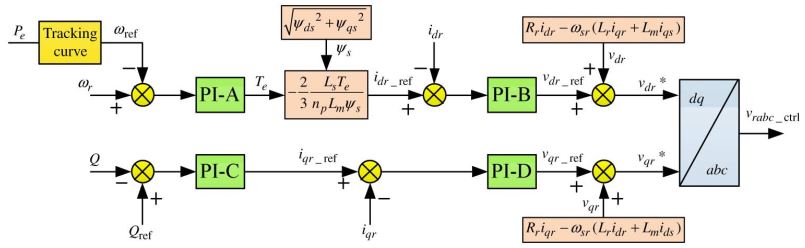
شکل 4) کنترل برداری مبدل سمت روتور یا RSC
در شکل 4، در حالت عملکرد نرمال، کنترل کننده RSC برای کنترل سرعت روتور و
خروجی توان راکتیو استفاده شده است. در اینجا مرجع توان راکتیو به مقدار
صفر تنظیم می شود به نحوی که خروجی توان راکتیو واقعی ژنراتور به مقدار
صفر کنترل شود. به عبارت دیگر ژنراتور توان راکتیو را نه از سیستم جذب کرده
و نه به سیستم تحویل می دهد.
کنترل مبدل سمت شبکه
این مبدل برای تنظیم کردن ولتاژ خط DC بین دو مبدل استفاده می شود. در
طول عملکرد عادی، GSC ولتاژ خط DC بین دو مبدل را با متعادل کردن توان
راکتیو در هر دو مبدل کنترل می کند. همچنین GSC قادر است توان تزریقی به
شبکه را به منظور کنترل ولتاژ شبکه کنترل نماید. این مزیت در هنگام رخدادن
خطا و پایداری ولتاژ شبکه مورد توجه قرار می گیرد.
GSC شامل یک حلقه کنترل بیرونی است که ولتاژ خط DC را کنترل می کند و تلاش
می کند تا آن در مقدار نامی نگه دارد. یک حلقه کنترل PI داخلی نیز جریان
GSC را کنترل می کند. از آنجایی که GSC به طور مستقیم به شبکه وصل می شود
توان خروجی آن باید تحت یک فرکانس ثابت متناظر با فرکانس شبکه باشد. طرح
کنترل GSC در روش کنترل برداری مرسوم در شکل 5 نمایش داده شده است. طرح
کنترلی GSC در چهارچوب مرجع ولتاژ استاتور انجام می شود.
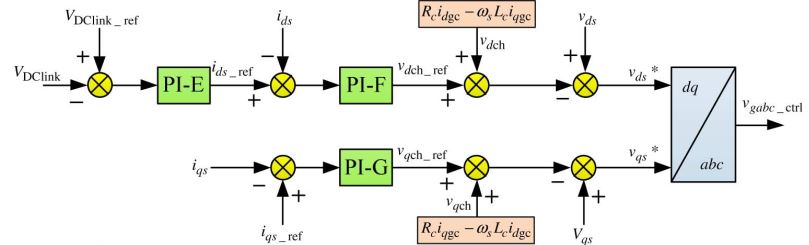
شکل 5) کنترل برداری مبدل سمت شبکه یا GSC
کنترل کننده گام
کنترل کننده گام برای تنظیم سرعت در ناحیه عملکردی با بار کامل استفاده
می شود. بالای سرعت نامی باد، توان خروجی تنظیم شده فقط متناسب با سرعت
روتور تغییر می کند، چون گشتاور ثابت باقی می ماند، بنابراین تنظیم توان
به طور کامل وابسته به تنظیم سرعت است.
هدف کنترل زاویه گام بهینه سازی استخراج توان از توربین بادی و همچنین
جلوگیری از تولید توان اضافه بر نامی در سرعت باد قوی است. طرح کنترل در
شکل 6 نمایش داده شده است:
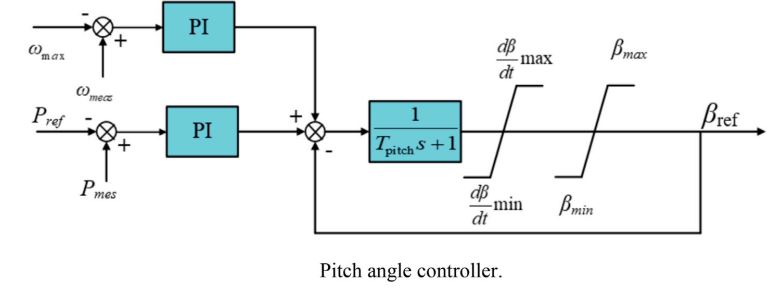
شکل 6) کنترل زاویه گام برای ژنراتور القایی دوبل تغذیه
این کنترل کننده از سه بخش تشکیل شده است:
کنترل سرعت گام
این قسمت مربوط به کنترل سرعت بوده و به کمک کنترل کننده PI انجام می شود.
جبرانگر
گام
این قسمت مربوط به کنترل توان اکتیو بوده و به کمک کنترل کننده PI انجام می
شود.
محرک گام
این قسمت نقش فیلترینگ، محدودسازی دامنه و نرخ تغییر و همچنین تثبیت گام
را انجام می دهد.
شبیه سازی و کنترل یک ژنراتور القایی دوبل تغذیه
در این قسمت یک ژنراتور القایی دوبل تغذیه با توان مکانیکی 1.5 مگاوات و
ولتاژ 400 ولت در نظر گرفته شده و فرآیند کنترل مؤثر آن در سیمولینک متلب
انجام شده است. پیکربندی ژنراتور به همراه توربین بادی، مبدلها، خازن لینک
DC، فیلترها و مدل شبکه توان در شکل 7 نشان داده شده است. توجه می کنیم
که اتصال سیستم توان بوسیله منبع ولتاژ سه فاز انجام می شود که با امپدانس
معادل تونن سری شده است.
یک فیلتر سلفی – مقاومتی اتصال مبدل شبکه را به نقطه اتصال مشترک برقرار
می کند. همچنین یک فیلتر خازنی نیز به صورت موازی بین نقطه اتصال مشترک و
منبع توان جهت کاهش هارمونیک ها متصل است.
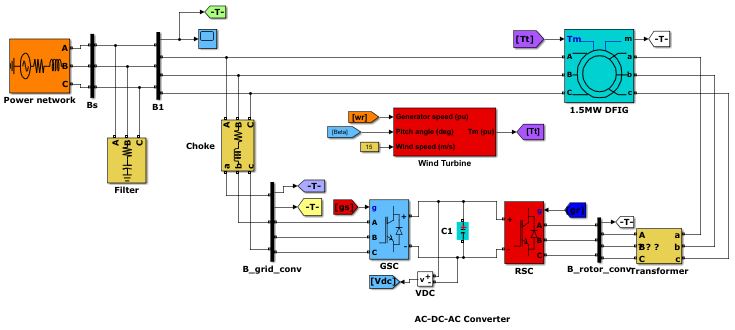
شکل 7) سیستم DFIG به همراه توربین بادی و مبدل AC/DC/AC
جزء مهم شبیه سازی سیستم کنترل آن می باشد که نمای کلی بلوک آن در شکل 8 نمایش داده شده است. کنترل کلی سیستم شامل بخشهای زیر است:
1)کنترل مبدل سمت شبکه
2) کنترل مبدل سمت روتور
3) کنترل زاویه گام توربین
توضیحات مربوط به هر یک از این قسمت ها
در بخش های قبل ارائه شده است. خروجی بلوک کنترل کلی سیگنالهای گیت برای
تحریک کلیدهای دو مبدل به صورت جداگانه و همچنین زاویه گام مناسب برای بلوک
توربین بادی است.
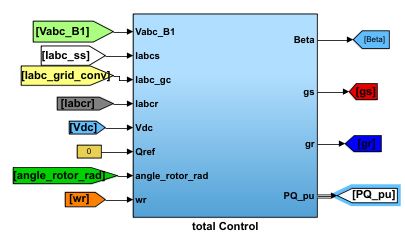
شکل 7) کنترل کلی سیستم شامل کنترل مبدل ها و زاویه گام توربین
مسئله مهم در کنار مدلینگ صحیح سیستم کنترل، تنظیم پارامترهای کنترل کننده
ها می باشد. در سیستم کنترل در مجموع 7 کنترل کننده وجود دارد که به
تعداد 6 تا از آنها از نوع تناسبی – انتگرالی و کنترل کننده دیگر از نوع
تناسبی است. این کنترل کننده ها به روش سعی و خطا در این شبیه سازی تنظیم
شده است.
بعد از تنظیم کنترل کننده ها به سراغ ران شبیه سازی و بدست آوردن نتایج
می رویم. زمان شبیه سازی در اینجا 3 ثانیه تنظیم شده است که در طی آن فرض
شده است که سرعت باد برابر با مقدار ثابت 15 متر بر ثانیه باشد. مقدار
مرجع توان راکتیو و مقدار مؤلفه جریان در راستای محور q برای مبدل سمت شبکه
برابر با صفر تنظیم شده است. در ادامه تعدادی از نتایج شبیه سازی ارائه
شده است.
در شکل 8 تغییرات توان اکتیو و راکتیو مبادله شده در نقطه اتصال مشترک
ارائه شده است. همان طور که مشخص است توان اکتیو در نهایت در مقدار حدودی
1.5 مگاوات به حالت ماندگار خود می رسد. از طرفی توان راکتیو نیز مرجع خود
را که مقدار صفر است، به خوبی دنبال می کند.

شکل 8) تغییرات توان اکتیو و توان راکتیو مبادله شده در نقطه اتصال مشترک
در شکل 9 تغییرات ولتاژ لینک DC و سرعت مکانیکی پریونیتی روتور ارائه شده
است. از نمودار اول مشخص است که تثبیت ولتاژ در مقدار 1150 ولت که مقدار
مرجع تنظیم شده در شبیه سازی بوده، به خوبی انجام شده است. همچنین از
نمودار دوم مشخص است که سرعت روتور بعد از کمی نوسان به مقدار ماندگار می
رسد. دلیل اینکه مقدار پریونیتی سرعت بیشتر از یک است به این خاطر است که
سرعت مرجع باد مقدار 15 متر بر ثانیه می باشد که از مقدار سرعت نامی
ژنراتور یعنی 11 متر بر ثانیه بیشتر است.

شکل 9) تغییرات ولتاژ لینک DC و سرعت پریونیتی محور روتور
در شکل 10 مشخصه ولتاژها و جریانهای سه فاز در نقطه اتصال مشترک در حالت
ماندگار ارائه شده است. با توجه به نمودار اول پیک ولتاژ در حالت ماندگار
به مقدار 565 ولت میرسد.

شکل 10) ولتاژها و جریان سه فاز در نقطه اتصال به شبکه (حالت ماندگار)
حفاظت سیستم های قدرت
مقدمه
هدف از ایجاد یک سیستم قدرت، تحویل مطمئن انرژی الکتریکی به مصرف کنندگان
می باشد، به گونه ای که انرژی تحویل داده شده از نظر اقتصادی مقرون به صرفه
بوده و همچنین از کیفیت مطلوب و ایمنی لازم مطابق با استانداردهای مطرح در
این زمینه برخوردار باشد.
در بحث سیستمهای قدرت، هریک از موضوعات قابلیت اطمینان، مصرف کننده،
اقتصادی بودن و کیفیت انرژی تحویلی دارای شرح و بسط فراوانی می باشد.
کتابها و مقالات بسیاری درباره این موضوعات نوشته شده و می شود. تجهیزات
حفاظتی رابطه بسیار تنگاتنگی با مفاهیم قابلیت اطمینان و کیفیت توان دارند.
به علاوه وجود این تجهیزات تا اندازه ای ضروری می باشد که امکان بهره
برداری بهینه از یک سیستم قدرت بدون وجود تجهیزات حفاظتی وجود ندارد.
سیستم حفاظتی یک شبکه نقش بسزایی را بر روی مقوله های کیفیت انرژی الکتریکی
و قابلیت اطمینان سیستم دارد. در صورتی که خطا به موقع از سیستم برداشته
نشود، این امر ممکن است موجب از دست رفتن سنکرون بودن شبکه گردد. نتیجه این
امر خاموشی کل شبکه خواهد بود که تبعات منفی بسیار زیادی را بر جامعه چه
از نظر اقتصادی و چه از نظر اجتماعی تحمیل می کند.
در گذشته مرسوم
بود که سیستم حفاظتی شبکه به صورت مستقل طراحی و بهره برداری می شد. این
سیستم عهده دار حفاظت از شبکه در برابر انواع خطاهای روی داده بر روی آن می
باشد. این عمل توسط تجهیزات حفاظتی که شاخص ترین آنها رله ها می باشند
فراهم می شود. هر عمل حفاظتی از طریق یک رله خاص تامین می گردد و به این
ترتیب یک سیستم حفاظتی شامل تعداد زیادی رله است. همان گونه که ذکر شد، از
دوران به کارگیری این سیستمها زمان زیادی نگذشته است و بسیاری از این
سیستمها هم اکنون نیز در داخل شبکه ها مورد بهره برداری می باشند.
در حال حاضر سیستمهای حفاظتی با سیستمهای کنترلی شبکه درهم آمیخته و
سیستمهای کنترل و حفاظت هماهنگ شده را به وجود آورده اند. در این سیستمها
اندازه گیری های مورد نیاز جهت مقاصد کنترلی و حفاظتی می باشد. در این
سیستم مقادیر کنترلی و اعمال مورد نظر برای آنها تعریف می گردند. برخلاف
رله های قدیمی در سیستمهای جدید یک رله عددی عهده دار اعمال حفاظتی می
باشد. این رله علاوه بر اعمال حفاظتی اعمال کنترلی را نیز انجام می دهد. می
توان گفت که یک رله عددی عهده دار اعمال حفاظتی، کنترلی، اندازه گیری،
پایش، ثبت وقایع، کنترل و سنجش از راه دور و غیره به صورت توام می باشد.
ضروریات اساسی سیستم حفاظتی
یک وسیله حفاظتی سه وظیفه اساسی دارد:
1- حفاظت از کل سیستم برای تداوم تغذیه الکتریکی
2- مینیمم کردن خسارت و هزینه ناشی از خطا
3- تامین حفاظت پرسنل
این نیازمندیها بسیار ضروری می باشد. اولی
برای شناسایی سریع و جدا کردن خطاست در حالیکه دومی برای بازگرداندن هر چه
سریعتر وسیله دارای مشکل به سیستم بکار می رود.
برای انجام وظایف بالا حفاظت باید ویژگیهای زیر را داشته باشد:
1-قابلیت انتخاب: شناسایی و جدا کردن فقط قسمت خطادار
2-پایداری: عدم جلوگیری از فعالیت قسمتهای سالم برای تداوم تغذیه
3-حساسیت: برای شناسایی حتی کوچکترین خطاها و عملکرد صحیح آن قبل از ایجاد آسیب غیر قابل تعمیر
4-سرعت: عملکرد سریع آن در هنگام مورد نیاز برای مینیمم کردن آسیب رسیدن به اطراف و تامین ایمنی پرسنل
برای رسیدن به تمام نیازمندیهای بالا، حفاظت باید قابلیت اطمینان بالای داشته باشد که به مفهوم زیر است:
قابلیت اطمینان: یعنی در هنگام مورد نیاز فرمان قطع را صادر کند.
ایمنی: یعنی در هنگامی که مورد نیاز نیست فرمان قطع را ندهد.
اجزای اصلی سیستم حفاظتی
حفاظت از هر سیستم توزیع تابعی از اجزای بسیاری است. در زیر توضیح مختصری از اجزای اصلی سیستم حفاظتی داده شده است.
فیوز:
فیوز یک قطعه قطع خودکار است که در مدار قدرت جریان را به صورت دائم از
خود عبور می دهد و در شرایط غیرعادی با سوختن یا ترکیدن، خود را قربانی می
کند. این فیوزها بر خلاف کلیدهای قدرت که برای عملکرد نیازمند دستورات
تجهیزات دیگر هستند، قطعاتی مستقل هستند.
ترانسهای جریان و ولتاژ:
حفاظت صحیح بدون اندازه گیری صحیح شرایط سیستم در وضعیت عادی و غیر عادی
ممکن نیست. در سیستم الکتریکی ابزارهای اندازه گیری ولتاژ و جریان فیدبکی
از وضعیت سیستم می دهند که سالم یا ناسالم بودن سیستم را نشان دهند.
ترانسهای ولتاژ و ترانسهای جریان این پارامترهای اساسی را اندازه گرفته و
برای اندازه گیری صحیح در هنگام خطا نیز بسیار مطمئن هستند.
رله:
مقادیر اندازه گیری شده سپس به صورت سیگنالهای آنالوگ یا دیجیتال درآمده و
برای کار با رله آماده می شوند. رله ها وظیفه ایزوله کردن قسمت خطادار را
با فرمان دادن به کلیدهای قدرت انجام می دهند. اغلب اوقات رله ها در هنگام
خطا دو سیگنال خروجی دارند. یکی سیگنال قطع و دیگری سیگنال هشدار.
درگذشته رله ها توابعی بسیار محدود داشتند و بسیار حجیم بودند، درحالیکه با
پیشرفتهایی که در تکنولوژی دیجیتال صورت گرفت و با استفاده از
میکروپروسسورها رله ها وظیفه نظارت بر پارامترهای بسیاری را دارند که
تاریخچه کاملی از سیستم را از قبل از وقوع خطا و در هنگام وقوع خطا در
اختیار ما قرار می دهند.
کلیدهای قدرت: باز کردن قسمتهای خطادار
نیازمند زمان است که این زمان در حدود میلی ثانیه است که ممکن است برای ما
اهمیت چندانی نداشته باشد. به هر حال کلیدهای قدرت که برای جدا کردن قسمت
خطادار به کار می روند توانایی عبور جریان خطادار را تا زمانی که جریان خطا
کاملا قطع شود، دارند. کلیدهای قدرت ابزار اصلی برای جداسازی سیستم توزیع
هستند و می توان گفت که به طور مستقیم از سیستم، حفاظت می کنند.
باطریهای
DC: عملکرد رله ها و کلیدها نیازمند منبع تغذیه ای است که نباید تحت تاثیر
خطا در سیستم توزیع اصلی باشد. بنابراین جزئی دیگر که برای سیستم حفاظت
اساسی است، باطریهایی هستند که انرژی بدون قطعی را برای رله ها و سیم
پیچهای کلیدها فراهم می کنند.
در ادامه این بحث به جهت اهمیت کار رله ها، بررسی مختصری در مورد رله های دیجیتال و مزایای آنها نسبت به رله های قدیمی می پردازیم.
انواع رله ها و مقایسه آنها
رله ها را می توان با توجه به سیستم به کار گرفته شده در آنها به چهار زیرگروه زیر تقسیم کرد:
1) رله های الکترومکانیکی مانند رله آرمیچر جذبی، رله کویل متحرک، رله القایی
2) رله های استاتیکی مانند رله های تقویت کننده مغناطیسی، ترمویونیک، نیمه هادی و فتوالکتریک
3) رله دیجیتال
4) رله عددی
اشکال اصلی رله های نوع اول و دوم این است که مختص یک
کمیت الکتریکی هستند یعنی اگر به عنوان مثال برای حفاظت اضافه جریان
استفاده می شوند دیگر برای حفاظت ولتاژ یا فرکانس قابل استفاده نیستند. حتی
رله های اضافه جریان هم تقسیم بندی خاص خود را دارند و استانداردهای
مختلفی برای این منظور وجود دارد. در کل این رله ها به جز تنظیم زمانی
وتنظیم جریانی، قابلیت انعطاف دیگری ندارند.
تقسیم رله ها به دو دسته دیجیتال و عددی بر پایه جزئیات فنی صورت گرفته
است. این تقسیم بندی به ندرت در مقوله ای غیر از مبحث حفاظت یافت می شود.
رله های عددی را می توان نتیجه طبیعی پیشرفتهای حاصل شده در زمینه رله های
دیجیتال، ناشی از پیشرفتهای فناوری های مختلف دانست.
امروزه رله های حفاظتی عمومی از نوع دیجیتالی یا عددی هستند و در نتیجه می
توان با تغییر برنامه نرم افزاری آن ها نوع حفاظت مورد نیاز را تعیین کرد.
بعد از دیجیتالی شدن محاسبات اتصال کوتاه، پخش بار و پایداری سیستم های
قدرت، دیجیتالی کردن رله های حفاظتی در سیستم های قدرت یکی از موضوعات
جالب و مطرح در سالهای اخیر می باشد. موضوع رله های دیجیتال در اواخر دهه
1960 شروع گردید. در اوایل به دلیل بالا بودن هزینه سیستم های دیجیتال ،
سرعت پایین و همچنین قدرت مصرفی بالای آنها انگیزه های جهت کاربرد این
تجهیزات به جای رله های معمولی وجود نداشت.
پیشرفت قابل توجه سیستم های دیجیتال ، کاهش قیمت ،کاهش قدرت مصرفی واندازه
آنها و افزایش سرعت و قدرت محاسباتی آنها باعث شده است که اقتصادی ترین،
فنی ترین و همچنین مطمئن ترین رله های حفاظتی در حال حاضر، رله های دیجیتال
باشند. لذا جدیدترین نسل رله ها، رله های دیجیتالی هستند.
کاربرد پردازش دیجیتال و استفاده از میکروپروسسورها به عنوان واحد پردازش
در رله های دیجیتال، علاوه بر بالا بردن کارایی و قابلیت عملکردی، منجر به
کاهش حجم و وزن رله و همچنین قیمت پایین طراحی و ساخت گردیده است. طراحی و
ساخت رله های دیجیتال گام بزرگی در جهت حفاظت دقیق و مطمئن شبکه های گسترده
و پیچیده امروزی است.
عمده تفاوت رله های دیجیتالی با رله های استاتیکی در کاربرد یک تراشه به
نام میکروپروسسور یا واحد پردازش مرکزی است. همچنین یک تراشه متمرکز به نام
میکروکنترلر که در آن علاوه بر cpu، حافظه های RAM و ROM، مدارهای واسطه،
پورت های ورودی/خروجی، مدار های وقفه و… در یک تراشه مدار مجتمع(IC) قرار
دارند، در برخی رله های دیجیتال کاربرد یافته است. یکی از مزیت های اصلی
رله های دیجیتال این است که با تغییر نرم افزار رله و برنامه ریزی مختلف می
توان نوع حفاظت رله را تعیین کرد.
در کل می توان مزایای رله های
دیجیتالی و عددی را نسبت به سایر رله های حفاظتی (الکترومغناطیسی،
الکترودینامیکی، حرارتی، اندوکسیونی و…) به شرح زیر بیان کرد:
1) امکان تشخیص زود هنگام خطا و جلوگیری از گسترش آن
2) قابلیت تغییر عملکرد و نوع حفاظت رله با تغییر نرم افزار رله
3) دارای کارایی و قابلیت اطمینان بالا
4) هزینه نسبتا پایین طراحی و ساخت
5) قابلیت ثبت و ضبط وقایع و رخدادهای سیستم به خاطر بهره گیری از حافظه
6) دارای حجم و وزن کوچکتر
7) دارای دقت بالا در تنظیم و انعطاف پذیری نسبت به شرایط مختلف شبکه جهت تنظیم
8) نگهداری آسان و تعمیر و عیب یابی کمتر
9) عملکرد به موقع و سرعت و دقت بالا
10) امکان جلوگیری از تاثیر اشباع ترانسفورماتورهای نمونه بردار در کار نابجای رله
پیکربندی های توربین بادی
مقدمه امروژه استفاده از توربین های بادی پیشرفته برای تولید برق در سراسر جهان رو به گسترش است و یکی از سیاست های اصلی توسعه انرژی تجدیدپذیر را در کشورهای پیشرفته به خود اختصاص می دهد. توربین بادی وسیله ای است که انرژی نهفته در باد را دریافت کرده و بر اساس مکانیزمی که در آن تعبیه شده، انرژی باد را به انرژی الکتریکی تبدیل می کند. توربین های بادی می توانند در اندازه های مختلف و با ساختارهای گوناگون به صورت جدا یا در غالب مزرعه بادی مورد بهره برداری قرار گیرند. از نظر سرعت عملکردی، آنها در سرعت ثابت یا در سرعت متغیر کار می کنند. در ادامه با هر یک از ساختارها به صورت مختصر آشنا می شویم. توربین های بادی سرعت ثابت در اوایل دهه 1990، توربین های بادی نصب شده استاندارد در سرعت ثابت کار می کردند. این به معنی آن است که صرفنظر از سرعت باد، سرعت روتور توربین ثابت است و بوسیله فرکانس شبکه توان، نسبت گیر و طراحی ژنراتور مشخص می شود. مشخصه توربین هایی با سرعت ثابت این است که با یک ژنراتور القایی (قفسه سنجابی یا روتور سیم بندی شده) تجهیز می شوند که به طور مستقیم با یک راه انداز نرم و یک بانک خازنی که برای کاهش جبران توان راکتیو بکار می رود، به شبکه متصل می شود. آنها برای بدست آوردن ماکزیمم بازده در یک سرعت بادی خاص طراحی می شوند. برای افزایش تولید توان، ژنراتور مربوط به تعدادی از توربین های سرعت ثابت دارای دو مجموعه سیم پیچی است: یکی در سرعت های بادی پایین(معمولا 8 قطبه) و دیگری در سرعت های بادی متوسط و بالا (معمولاً 4 تا 6 قطب) استفاده می شود.
توربین بادی سرعت ثابت دارای مزیت ساده بودن، مقاوم بودن و قابل اعتماد و اثبات شده می باشد و هزینه قسمتهای الکتریکی آن پایین است. عیوب آن مصرف توان راکتیو غیر قابل کنترل، استرس مکانیکی و کنترل محدود شده کیفیت توان است. بعلت عملکرد سرعت ثابت، همه نوسانات در سرعت بادی بیشتر به صورت نوسانات در گشتاور مکانیکی و سپس به صورت نوسانات در توان الکتریکی شبکه ظاهر می شود. در حالتی که شبکه ضعیف وجود دارد، نوسانات توان می تواند همچنین منجر به نوسانات بزرگ ولتاژ شود که به نوبه خود باعث تلفات قابل توجه خط می شود. توربین های بادی سرعت متغیر در طول چند سال گذشته توربین بادی سرعت متغیر نوع غالب در میان توربینهای نصب شده بوده است. توربین های سرعت متغیر برای دست یابی به بازده آیرودینامیکی ماکزیمم در طول یک رنج گسترده از سرعت های بادی طراحی می شود. با یک عملکرد سرعت متغیر، تطبیق پیوسته (تسریع یا کاهش شتاب) سرعت چرخشی ω توربین بادی تا سرعت باد ν ممکن شده است. به این طریق، نسبت سرعت نوک λ (که λ برابر با ωR/ν می باشد که R شعاع روتور است) در یک مقدار پیش تعیین شده که مربوط به ضریب توان ماکزیمم است، به صورت ثابت حفظ می شود. در تضاد با سیستم سرعت ثابت، یک سیستم سرعت متغیر، گشتاور ژنراتور را ثابت نگه می دارد و تغییرات در باد بوسیله تغییر در سرعت ژنراتور نمود پیدا می کند. سیستم الکتریکی یک توربین بادی سرعت متغیر پیچیده تر از یک توربین بادی سرعت ثابت است. معمولاً با یک ژنراتور سنکرون یا القایی تجهیز شده و از طریق یک مبدل توان به شبکه متصل می شود. مبدل توان سرعت ژنراتور را کنترل می کند؛ یعنی نوسانات توان ایجاد شده بوسیله تغییرات باد اساساً بوسیله تغییرات در سرعت روتور و در نتیجه در سرعت روتور توربین نمود پیدا می کند.مزیت های توربین های بادی سرعت متغیر، افزایش جذب انرژی، کیفیت توان بهبودیافته و استرس مکانیکی کاهش یافته در توربین می باشند. عیب های آن تلفات در اجزای الکترونیک قدرت، استفاده از تجهیزات بیشتر و هزینه افزایش یافته تجهیزات بعلت الکترونیک قدرت می باشند. در توربین بادی سرعت متغیر، می توان بسته به ترکیب موردنظر، چند نوع ژنراتور را بکار برد و همچنین چند درجه آزادی در ترکیب نوع ژنراتور و نوع مبدل توان وجود دارد که در ادامه به آن خواهیم پرداخت. اما قبل از آن بهتر است نگاهی به انواع کنترل توان در سیستم توربین بادی داشته باشیم. بررسی اجمالی مفهوم کنترل توان همه توربین های بادی با چند نوع از کنترل توان طراحی می شوند. روش های مختلفی برای کنترل نیروهای آیرودینامیکی در روتور توربین وجود دارد و بنابراین در سرعت های خیلی زیاد باد، برای اجتناب از خرابی توربین می توان توان را محدود کرد. ساده ترین، مقاوم ترین و ارزان ترین روش کنترل، کنترل stall (کنترل پسیو یا قطع) است که تیغه ها به توپی در زاویه ثابت جوش داده می شوند. طراحی آیرودینامیک های روتور باعث می شود که روتور متوقف شود (از دست رفتن توان) زمانی که سرعت های باد اضافه بر سطح معینی شود. بنابراین توان آیرودینامیکی در تیغه ها محدود می شود. چنین تنظیم توان آیرودینامیکی آهسته باعث نواسانات توان کمتر نسبت به تنظیم توان گام – سریع می شود. چند عیب روش، بازده پایین تر در سرعت های بادی پایین، عدم وجود راه اندازی کمکی و تغییرات در توان حالت ماندگار ماکزیمم بعلت تغییر در چگالی هوا و فرکانس های شبکه می باشد. نوع دیگر کنترل، کنترل گام (کنترل فعال) می باشد که تیغه ها می توانند به ترتیب در خلاف جهت باد یا در جهت باد بچرخند، به صورتی که خروجی توان به ترتیب خیلی زیاد یا خیلی کم می شود. به طور معمول، مزیت های این نوع کنترل عبارتند از: کنترل توان خوب، راه اندازی پشتیبانی شده و توقف اضطراری. از نقطه نظر الکتریکی، کنترل توان خوب به این معنی است که در سرعتهای بالای باد، مقدار متوسط خروجی توان نزدیک به توان نامی ژنراتور باقی می ماند. بعضی عیب های آن نیز عبارتند از: افزایش پیچیدگی اضافی ناشی از مکانیزم گام و نوسانات بالاتر توان در سرعت های بالای باد. توان لحظه ای به دلیل بادهای ناگهانی و سرعت محدودشده مکانیزم گام، در حدود مقدار متوسط نامی توان نوسان می کند. راه کار کنترل ممکن سوم، کنترل قطع فعال می باشد. همانطور که از اسم آن مشخص است، فرآیند قطع تیغه به طور فعال توسط گام تیغه ها کنترل می شود. در سرعتهای پایین باد، تیغه ها مشابه با توربین بادی گام کنترل شده، جهت دستیابی به بازده ماکزیمم گام بندی شده هستند. در سرعتهای بالای باد تیغه ها با مقدار کمی گام بندی شدگی در جهت مخالف با یک توربین کنترل شده با گام به قطع عمیق تری حرکت می کنند. توربین بادی با روش کنترل قطع فعال بدون نوسانات بالای توان که در توربین های گام کنترل شده وجود دارد، منجر به توان محدودشده هموارتری می شود. این نوع کنترل دارای این مزیت است که قادر به جبران تغییرات در چگالی هوا خواهد بود. در حالت ترکیب با مکانیزم گام، انجام توقف های اضطراری و سپس راه اندازی توربین کار آسانتری خواهد بود. پیکربندیهای مختلف توربین بادی در ادامه رایج ترین پیکربندی های توربین بکاررفته از نظر توانایی کنترل سرعت و نوع کنترل قدرت طبقه بندی شده اند. اگر کنترل سرعت را به عنوان معیار درنظر بگیریم، چهار نوع غالب و مختلف از توربین بادی وجود دارد که عبارتند از: نوع1: سرعت ثابت نوع2: سرعت متغیر محدودشده نوع 3: سرعت متغیر با مبدل فرکانسی مقیاس جزئی نوع4: سرعت متغیر با مبدل فرکانسی در مقیاس کامل در ادامه هر یک از پیکربندیها را مورد بررسی قرار می دهیم و مشخص می کنیم که چه نوع کنترل سرعت و یا کنترل توانی برای آنها ممکن است و همچنین در مورد مزیتها و معایب آنها بحث می کنیم. نوع1: سرعت ثابت

شکل 1) پیکربندی توربین بادی نوع 1، در اینجا منظور از SCIG ژنراتور القایی قفسه سنجابی می باشد.
پیکربندی فوق توربین بادی سرعت ثابت را با یک ژنراتور القایی قفسه سنجابی (SCIG) نشان می دهد که از طریق یک ترانسفورماتور به طور مستقیم به شبکه متصل می شود. چونکه SCIG همیشه توان راکتیو از شبکه می کشد، این پیکربندی از یک بانک خازنی برای جبران توان راکتیو استفاده می کند. همچنین برای یک اتصال نرم به شبکه از راه انداز نرم استفاده می شود. صرفنظر از قاعده کنترل توان در یک توربین بادی سرعت ثابت، نوسانات باد به نوسانات مکانیکی و در ادامه به نوسانات توان الکتریکی منجر می شود. در حالتی که یک شبکه ضعیف وجود دارد، این می تواند منجر به نوسانات ولتاژ در نقطه اتصال به شبکه شود. بعلت این نوسانات ولتاژی، توربین بادی سرعت ثابت مقدارهای متغیر توان راکتیو را از شبکه توان می کشد (مگر اینکه بانک خازنی وجود داشته باشد) که هر دوی نوسانات ولتاژ و تلفات توان را افزایش می دهد. بنابراین عیب های اصلی این مورد آن است که از هیچ کنترل سرعتی پشتیبانی نمی کند، به یک شبکه مقاوم احتیاج دارد و ساخت و ساز مکانیکی آن باید قادر به تحمل استرسهای مکانیکی بالایی باشد. این نوع توربین با هر سه نوع کنترل توان در صنعت توربین بادی مورد استفاده قرار میگیرد که در ادامه به آنها خواهیم پرداخت.
کنترل قطع این نوع کنترل توسط سازندگان دانمارکی توربین بادی در طول دهه 1980 و 1990 میلادی (برای توربین سه تیغه قطع تنظیم شده بالادستی) بکار برده شد. این طرح بعلت قیمت نسبتاً پایین، سادگی و مقاومتش بسیار معروف شده بوده است. توربین های بادی قطع کنترل شده نمی توانند راه اندازیهای پیوسته را انجام دهند که به این معنی است که در طول اتصال پی در پی، توان توربین نمی تواند کنترل شود.
کنترل گام مزیتهای اصلی این نوع کنترل توربین این است که کنترل پذیری توان، راه اندازی کنترل شده و توقفهای اضطراری را تسهیل می کند. عیب اصلی آن این است که در سرعتهای بالای باد حتی تغییرات کوچک در سرعت بادی منجر به تغییرات بزرگ در توان خروجی می شود. مکانیزم گام برای جلوگیری از چنین نوسانات توانی به اندازه کافی سریع نمی باشد. تغییرات آهسته در باد می تواند با گام بندی تیغه جبران شود اما در حالت تندبادها ممکن نیست.
کنترل قطع فعال این پیکربندی اساساً همه مشخصات کیفی سیستم قطع – تنظیم شده را حفظ می کند. به عنوان نتیجه ای از بکارگیری کنترل قطع فعال، در استفاده بهتر از سیستم کلی بهبودهایی وجود دارد. اتصال انعطاف پذیر تیغه ها به توپی همچنین توقف اضطراری و راه اندازی را تسهیل می کند. عیبی که وجود دارد قیمت بالاتر آن می باشد که به خاطر مکانیزم گام بندی و کنترل آن است. مفهوم سرعت متغیر بوسیله هر سه پیکربندی دیگر بکاربرده می شود؛ اما بعلت ملاحظات محدودیت توان امروزه فقط با مکانیزم کنترل گام سریع استفاده می شود. بنابراین دو تکنیک کنترلی دیگر یعنی قطع و قطع فعال برای این سه پیکربندی بکار نمی رود. نوع2: سرعت متغیر محدودشده
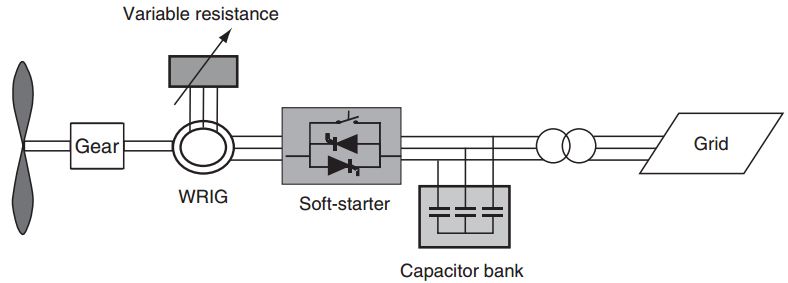
شکل 2) پیکربندی توربین بادی نوع 2، در اینجا منظور از WRIG ژنراتور القایی روتور سیم بندی شده می باشد.
پیکربندی فوق مربوط به توربین بادی سرعت متغیر محدودشده با مقاومت روتوری متغیر ژنراتور می شود و از یک ژنراتور القایی روتور سیم بندی شده استفاده می کند. ژنراتور همانند نوع 1 به طور مستقیم به شبکه متصل می شود. یک بانک خازنی نیز جبران توان راکتیو را انجام می دهد. با استفاده از راه انداز نرم نیز اتصالی همواری به شبکه بدست آورده می شود. ویژگی یکتای این مورد آن است که یک مقاومت روتور اضافی متغیر دارد که میتواند بوسیله یک مبدل کنترل شده به صورت بهینه تغییر داده شود که روی محور روتور قرار گرفته است. بنابراین مقاومت روتوری کل قابل کنترل است. این اتصال بهینه نیاز به رینگهای لغزشی پرهزینه را که احتیاج به جاروبکها و حفاظت دارد، حذف می کند. مقاومت روتور می تواند تغییر داده شود و بنابراین لغزش را کنترل می کند. با این روش توان خروجی در سیستم کنترل می شود. رنج کنترل سرعت دینامیکی بستگی به اندازه مقاومت متغیر روتور دارد. به طور نمونه رنج سرعت از 0 تا 10 درصد بالای سرعت سنکرون می باشد. انرژی حاصل از واحد تبدیل توان خارجی بوسیله اتلاف گرمایی دمپ می شود. نوع 3: سرعت متغیر با مبدل فرکانسی مقیاس جزئی
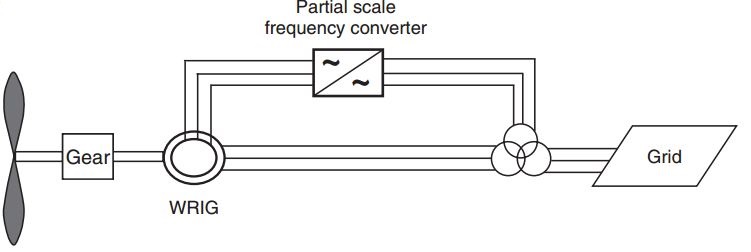
شکل 3) پیکربندی توربین بادی نوع 3، در اینجا منظور از WRIG ژنراتور القایی روتور سیم بندی شده می باشد.
این پیکربندی که با نام «ژنراتور القایی دوبل تغذیه (DFIG) شناخته» می شود، دارای یک توربین بادی سرعت متغیر محدودشده با یک ژنراتور القایی روتور سیم بندی شده (WRIG) و یک مبدل فرکانسی مقیاس جزئی (با مقدار نامی تقریبی 30 درصد از توان نامی ژنراتور) در مدار روتور می باشد. مبدل موردنظر جبران توان راکتیو و اتصال هموارتر به شبکه را انجام می دهد. این نوع سیستم توربین، دارای یک رنج گسترده تر از کنترل سرعت دینامیکی در مقایسه با نوع 2 می باشد که بستگی به اندازه مبدل فرکانسی دارد. به طور معمول رنج سرعت شامل 40- تا 30+ درصد سرعت سنکرون می باشد. عیبهای اصلی این پیکربندی استفاده از رینگ های لغزش و احتیاج به حفاظت در حالت وقوع خطاهای شبکه می باشد. نوع4: سرعت متغیر با مبدل فرکانسی در مقیاس کامل

شکل 4) پیکربندی توربین بادی نوع 4، خط شکسته به طور گیربکس یعنی پیکربندی می تواند شامل گیربکس باشد یا نباشد. در اینجا منظور از WRIG ژنراتور القایی روتور سیم بندی شده، PMSG ژنراتور سنکرون مغناطیس دائم و WRSG ژنراتور سنکرون روتور سیم بندی شده است.
این پیکربندی مربوط به توربین بادی سرعت متغیر کامل می باشد که ژنراتور آن از طریق یک مبدل فرکانسی مقیاس کامل به شبکه متصل می شود. مبدل فرکانسی جبران توان راکتیو و اتصال هموارتر به شبکه را ممکن می سازد. ژنراتور می تواند به طور الکتریکی [با ساختار ژنراتور سنکرون روتور سیم بندی شده (WRSG) یا (WRIG) ] یا با استفاده از آهنرباهای دائم [ با ساختار ژنراتور سنکرون مغناطیس دائم (PMSG) ] تحریک شود. بعضی سیستم های توربین بادی سرعت متغیر کامل گیربکس ندارند. در این حالتها یک ژنراتور چندقطبه هدایت شده به صورت مستقیم با یک قطر بزرگتر استفاده می شود
کار با سامانه همانندجو و راه جلوگیری از سرقت علمی
شماره تماس و واتس اپ برای ارتباط و مشاوره 09906118613
کپی کردن واژههای به کار رفته در اثر یک محقق دیگر به صورت واژه به واژه سرقت علمی تحت اللفظی است. درصورتی که متن کپیشده از منابع علمی بسیاری به صورت لفظ به لفظ کپی شده باشد، به این نوع سرقت علمی سرهمبندی گفته میشود.
سرقت علمی نظرات (Plagiarism of ideas)
اشاره به نظرات خاص فردی دیگر، که احتمال دارد دیدگاه، تفسیر، اطلاعات، شیوه یا اصطلاحات نو باشد، بدون مراجعه به منبع استفاده شده، سرقت علمی نظرات محسوب میشود، حتی اگر آنها را با کلمات خودتان بیان کنید.
سرقت علمی غیرمنسجم (Paraphrasing)
پارافریز یا نقل بیان به معنی اعمال تغییر در جملات آثار علمی دیگر محققین می باشد. در این نوع سرقت علمی اگرچه ساختار جملات عوض می گردند، اما اندیشه ها و منطق پژوهشگر اولیه هنوز هم دست نخورده وجود دارد. دقت کنید که طرز تفکر محقق اول را نمیتوانید عوض کنید.
سرقت علمی از منابع غیرآکادمیک
مشخص نکردن منابع غیرآکادمیک نیز سرقت علمی است. مثل مقالات چاپ شده در مجلات، در صورتی که از متن های موجود در کتابها، صفحات وب، کنفرانس ها و حتی گفتگوهای شخصی مانند توصیف ایده ها ارائه نشده استفاده میکنید، باید منابع را ذکر کنید.
سرقت علمی از خود (Self-plagiarism)
انتشار مجدد محتواهایی که در مقالات پیشین خود چاپ کردهاید یا چاپ یک مقاله مشابه در دو مجله متفاوت سرقت علمی از خود به شمار میآید. این مدل سرقت علمی، که اغلب نادیده گرفته میشود، از لحاظ اخلاقی مناسب نیست، بهویژه اینکه اکثر انتشارات از محقق یک تاییدیه میگیرد مبنی بر اینکه مقاله تا به حال در جای دیگری چاپ نشده است. درضمن، گاهی اوقات این کار نقض حق طبع و نشر نیز می باشد.
انواع پایگاه های همانندجوی فارسی و لاتین
سامانه شناسایی سرقت علمی همانندجو
این پایگاه توسط ایرانداک عرضه شده است. همانند جویی در نوشتار پایان نامه ها و رساله ها، گاهی در کمک به حفظ حقوق پدیدآوران و گسترش علم و فناوری و زمینهسازی برای دسترسی آزاد همگان به اطلاعات است. همانندجو با جستجوی خودکار در متن کامل پایاننامه ها و رساله های موجود در ایرانداک، متن همانند را بازیابی و اندازه همانندی و منبع اطلاعات همانند را نشان میدهد. دانشجویان پس از ورود به سامانه، میتوانند متن پایان نامه خود را بارگذاری و نتیجه همانندجویی را در کوتاه ترین زمان ممکن دریافت کنند.
سامانه همانندجوی سمیم نور
این پایگاه می تواند مقالات ارائه شده از جانب کاربران را با حجم انبوه اطلاعات خود مطابقت دهد و عبارات مشابه را بازیابی و مقایسه نماید. این سامانه در راستای «مجموعه پروژههای مبتنی بر داده کاوی علوم اسلامی» در مرکز تحقیقات کامپیوتری علوم اسلامی در حال انجام است.
علاوه بر سامانه های فارسی همانندجو، پایگاههای لاتین مانند پایگاه Turnitin، scanmyessay، copyscape، ithenticate، پایگاه اینترنتی eve۲،safeassign ، diffnow، text compare، Diff checker و text diff هم در همانندجویی و تشخیص سرقت علمی فعال هستند. بهتر است به پایگاه safeassign و eve۲ مراجعه نکنید چرا که از نظر صاحب نظران و دانشگاه ها این دو مرجع از رده خارج شدهاند. پایگاه اینترنتی diffnow، text compare!، Diff checker،text diff بیشتر برای مقایسه دو متن کارایی دارند. در این پایگاه های همانندجویی شما مقایسه میکنید که ببینید دو متن چه تفاوتی با هم دارند. در این پایگاه ها حتی تصاویر را هم میتوانید مقایسه کنید.
پایگاه تشخیص سرقت ادبی ITenticate
قوی ترین و بزرگترین پایگاه اینترنتی همانندجویی در دنیا ITenticate است که توسط Turnitin عرضه شده است. در این نوشتار به شکل مفصل آن این پایگاه همانندجویی مورد بررسی قرار گرفته است. ابتدا به سایت turnitin.com میروید و بعد از فوتر سایت، محصول ITenticate این سامانه را انتخاب می کنید.
به منظور استفاده از سامانه ITenticate باید اعتبار خریداری کنید و یک نام کاربری و گذرواژه داشته باشید که در سامانه لاگین کنید که معمولا هزینه آن ها بالا است. شما می توانید از طریق موسساتی مانند موسسه خدمات دانشجویی (فروغ پاسارگاد)برای ورود به این سامانه اقدام کنید. وقتی در سامانه خود لاگین شدید در پنل کاربری خود میتوانید با زدن لینک Submit documents هر تعدادی که مقاله دارید بارگذاری و انتخاب کنید.
بعد از این کار، سامانه یک گزارشی به شما خواهد داد که متن علمی بارگذاری شده ۳۰ درصد همپوشانی دارد. این مسائل از این حیث حائز اهمیت است که مجلات معتبر علمی حتما به این سامانه های همانندجو مجهز هستند. بهعنوان مثال انتشارات sage تمام مجلات تحت پوشش خود را به سامانه ITenticate مجهز کردند. حال اگر شما روی ۳۰ درصد همپوشانی مقاله خود کلیک کنید می توانید ببینید که با چه دقتی تمام جزییات موشکافی شده و مشخص است که هر قسمت از کدام منبع گرفته شده یا به عبارتی همانندی دارد و همچنین میتوانید به راحتی منابع را مشاهده کنید. همچنین می توانید این گزارش دقیق را از سامانه دریافت کنید.
پایگاه همانندجوی Diff checker
یکی از سامانههای همانندجوی خوب دیگر پایگاه Diff checker می باشد که از شما میخواهد متن اصلی و متن تغییر داده شده را وارد کنید. بهعنوان مثال شما از یک مقاله، متنی را اقتباس، بازنویسی و ویرایش کرده اید و می خواهید در مقاله یا پایان نامه خود استفاده کنید. بنابراین متن اصلی و متنی که خودتان آن را تغییر داده اید را در این سامانه قرار می دهید و سامانه همانندی ها را به شما اعلام میکند. استفاده از این پایگاه همانندجو تا محدودیت متن هزار کلمه ای رایگان می باشد. یکی از حُسن های این سامانه امکان مقایسه تصویر است به طور که میتوانید توسط آن تصاویر را با یکدیگر مقایسه کنید. همچنین فایل های pdfها را می توانید مقایسه کنید.
پایگاه همانندجوی Diff Now
در این پایگاه می توانید نیز متن اصلی منبع و متن تغییر داده شده را بارگذاری نموده تا آنها با هم مقایسه کنید و متوجه میزان همپوشانی شوید.
سامانه همانندجوی Small Seo Tools
یکی دیگر از پایگاه های مهم دیگر که در همانندجویی فعالیت دارند و میتوانید برای مقالات و پایان نامه خود از آن استفاده کنید، وبسایت SmallSeoTools.com است. به منظور استفاده رایگان می توانید هزار کلمه از مقاله یا پایان نامه خود را به منظور جستجوی همانندی در پایان نامه یا مقاله خود در این سایت قرار دهید. حال اگر پایان نامه یا مقاله شما ۵ هزار کلمه است میتوانید هر بار هزار کلمه قرار دهید و چک کنید و همانندی را مورد بررسی قرار دهید و هر قسمتی که احساس میکنید دارای همانندی است را اصلاح کنید.
چگونه متوجه شویم که در حال ارتکاب سرقت علمی هستیم؟
اکثر پایان نامه ها و مقالات بر اساس پژوهش های گذشته نوشته میشوند و اکثرا به منظور موفقیت در زمینه آکادمیک بسیار حائز اهمیت هستند. با این وجود، ارجاع اشتباه یا بازنویسی آثار پیشین، احتمال پذیرش مقاله یا پایان نامه را کاهش می دهد و دید حرفهای دانشجو را خدشهدار میکند.
از جمله دلایلی که باعث می شود افراد خواسته یا ناخواسته مرتکب به سرقت علمی شوند به این صورت میباشد:
• مشتاق به معروف شدن یا پیشرفت چشمگیر با انتشار مقاله
• نگرانی بابت نگارش مقاله به زبان انگلیسی
• ناتوانی در بیان نظرات پیچیده
• متکی شدن به منابع علمی محدود
• نمونه برداری از کار محققین بزرگ برای ستایش کار آنها
• عدم اطلاع معنای سرقت علمی
بهترین روش رفع همانندی مقالات چیست؟
آشنایی با روش های رفع Plagiarism می تواند منجر به دریافت امتیازی خوب از برنامه iThenticate شود. این برنامه، هر مقاله و محتوایی را با مقایسه با منابع دیگر بررسی میکند. در ادامه به روش هایی برای رفع Plagiarism اشاره شده است. به کمک این روشها، رفع سرقت ادبی میسر میشود:
پارافریز مقاله با بازنویسی آن
اگر مطلبی مرتبط با موضوع مقاله ای که نگارش خواهید کرد را در اختیار دارید، می بایست سعی کنید که ابتدا آن را کاملا درک کنید و بعد با عبارات و زبان مخصوص به خودتان از محتوای مربوطه استفاده نمایید. رونوشت از بیش از دو کلمه از یک مطلب جایز نیست و شما را در معرض اتهام به سرقت ادبی یا Plagiarism قرار میدهد.
در صورتی که به رونوشت بیش از دو واژه نیاز دارید، باید از نقلقول استفاده کنید و در مسیر نقل قول آوردن در مقاله خود هم باید اصول این کار را رعایت کنید.
درج منابع
یکی از بهترین روش ها برای رفع همانندی پایان نامه یا مقاله، پیگیری دقیق و اجرای قالب و شکلی است که برای نوشتن از شما خواسته شده است. فرقی نمیکند، فرمت MLA است یا شیکاگو، APA یا ...، شما باید فرمت درخواستی از سوی دانشگاه یا موسسه علمی و آموزشی را به خوبی رعایت کنید. در روش درج منابع، لازم است تا نام نویسنده یا نویسندگان، تاریخ انتشار و جزئیات مشابه دیگر نوشته شود. این روش بسیار ساده است. پس طی آن باید براساس دستورات و قوانین موسسه و دانشگاهی که قرار است، از پایان نامه خود دفاع نمایید یا مقاله تان در آن به چاپ برسد، اقدام به معرفی منابع خارجی و به کار رفته در پایان نامه یا مقاله تان نمایید.
استفاده از نقل قول
استفاده از نقل قول در نوشتن هم یکی از روش های کاهش همانندی در پایان نامه و مقاله است. با این حال به خاطر داشته باشید که موسسات علمی و ناشران معروف، از بیش از ۴۰ کلمه در نقل قول ها استقبال نمیکنند. پس اگر لازم باشد که بیشتر از این مقدار، نقل قول در جملات تان به کار برده شود، می بایست از تکنیک پارافریز یا بازنویسی بهره ببرید و نقل قول ها را با بازنویسی پایان نامه و مقاله در این بخش ها استفاده کنید.
این کار یعنی بازنویسی مقاله با استفاده از عبارات و کلمات خود در بیان نقل قول فردی دیگر که کمی زمان بر است، اما شما را از اینکه در معرض عواقب سرقت ادبی قرار بدهد به شدت نجات میدهد.
نقل قول با ذکر منابع
این روش از رفع همانندی پایان نامه یا مقاله با پارافریز کردن متفاوت است، زیرا در آن شماره پاراگراف ها یا شماره صفحه نقل قول ها هم از منابع اصلی شان در پایان نامه یا مقاله تان قرار می گیرد.
شماره تماس و واتس اپ برای ارتباط و مشاوره 09906118613
اصلاح مشکلات همانندجویی رشته مهندسی

![]()
شماره تماس و واتس اپ برای ارتباط و مشاوره 09906118613
سامانه همانندجو ، پس از نگارش پایان نامه یا رساله برای بررسی همانندی آنها با پروپوزال ها و پایان نامه های دیگر به کار می رود. این سامانه پس از دریافت یک نوشته ، با جستجوی خودکاری در تمام متن های سایت ایران داک ، بخش های همانند آن نوشته را در پایان نامه ها و رساله های دیگر نمایش می دهد و با کلیک کردن بر روی هر بخش ، دانشجو یا محقق را به نشانی منابع مشابه هدایت می کند.
دانشجویان باید برای بررسی همانندی پایان نامه خود با سایر پایان نامه ها ، وارد سایت همانندجو شوند و پس از عضویت در سامانه ، با واریز هزینه که به مبلغ 50 هزار تومان می باشد ، اقدامات لازم را انجام دهند.
موسسه پژوهشی به صورت تضمینی به رفع مشکل همانندی می پردازد و به دانشجویان کمک می کند تا میزان همانندی پایان نامه خود را کاهش داده و به درصد مورد نظر برسانند.
شماره تماس و واتس اپ برای ارتباط و مشاوره 09906118613
کاهش تضمینی درصد همانندجو پایان نامه
![]()
شماره تماس و واتس اپ برای ارتباط و مشاوره 09906118613
سامانه «همانندجو» در پاسخ به درخواست جامعه علمی کشور برای بهبود اخلاق علمی و حمایت از مالکیت فکری،معنوی و پیشگیری از بدرفتاریهای علمی راهاندازی شده است.
اگر درصد همانندی متنی بیشتر از 30 باشد آن متن رد خواهد شد. در آن صورت، برای کاهش درصد همانندی، لازم است رفع همانندی انجام شود. برای این کار معمولاً به بازنویسی یا تغییر ادبیات نوشتاری متن پایان نامه می پردازند.
موسسه انجام و مشاوره پایان نامه و مقاله گراد به صورت تضمینی به رفع مشکل همانندی می پردازد و به دانشجویان کمک می کند تا میزان همانندی پایان نامه خود را کاهش داده و به درصد مورد نظر برسانند.
جهت همانندجویی و رفع تضمینی همانندی با ما از راه های ارتباطی که در دسترس می باشد در ارتباط باشید.
شماره تماس و واتس اپ برای ارتباط و مشاوره 09906118613