همین امروز با ما تماس بگیرید!
شماره تماس ( Whatsapp&Telegram ): 09906118613
![]()
telegram: powerelectronic4u
Email:
![]()
Instagram:powerelectronic4u

نواع مختلفی از توربین های بادی وجود دارد ما را قادر می کنند تا بتوانیم در هر حالت و شرایطی امکان استفاده از انرژی مکانیکی بادی را برای تبدیل به انرژی الکتریکی داشته باشیم. برخی از آنها برای کاربردهای خانگی و در مقیاس کوچک و برخی در نیروگاه های بادی مورد استفاده قرار می گیرند. از آنجایی که لزوم کاهش وابستگی نسبت به منابع انرژی تجدیدناپذیر و بخصوص فسیلی روز به روز اهمیت بیشتری پیدا می کند و تمرکز بر استفاده از منابع تجدید پذیر و ارایه راه کارهای جدید و نوآورانه برای بهره وری و کارایی هر چه بیشتر در این خصوص است، بنابراین، دانستن اینکه چگونه انواع توربین های بادی چگونه به نظر می رسند و کجا می توان از آنها استفاده کرد، می تواند بسیار سودمند باشد.
مقدمه:
امروزه پرکاربردترین ژنراتور جهت تولید برق از انرژی بادی ژنراتور القایی
دوسوتغذیه (DFIG) می باشد. این نوع ژنراتورها قابلیت کار با سرعت متغیر را
فراهم می کنند و مبدلهای بکار رفته در آن با درصد کمی از توان نامی توربین
بادی سر و کار دارند (حدود 30 درصد). ژنراتور القایی دوبل تغذیه از نوع
ژنراتور القایی سیم بندی شده است که هم استاتور و هم روتور آن دارای سیم
پیچی های سه فاز می باشند. علت نامگذاری این نوع ژنراتور به ژنراتور
القایی دوسوتغذیه، به خاطر انتقال الکتریکی تولیدی به شبکه از دو راه
استاتور و روتور می باشد.
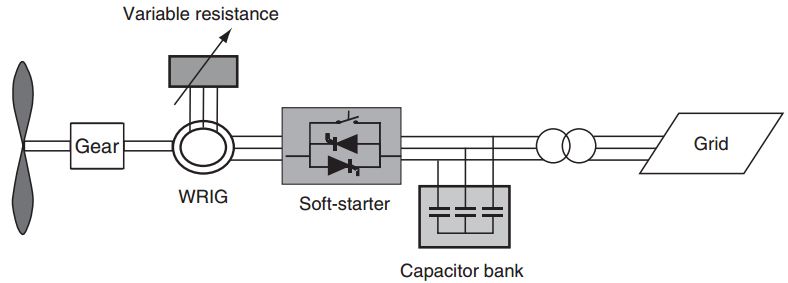
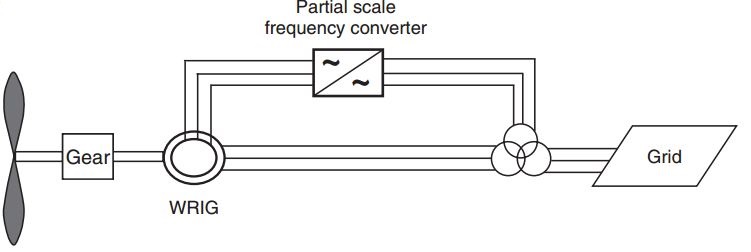
شکل 1 یک توربین بادی سرعت متغیر مجهز به DFIG را نشان می دهد. در این شکل،
مدار روتور ماشین به دو مبدل و یک خازن لینک DC مجهز است. در این نوع از
ژنراتور القایی استاتور به طور مستقیم به شبکه متصل می شود در حالیکه سیم
پیچی روتور از طریق حلقه های لغزان به یک اینورتر متصل است. این اینورتر
به نحوی طراحی شده که ژنراتور القایی در یک رنج سرعت متغیر محدود شده عمل
کند. توجه می کنیم که این اینورتر خود جزئی از مبدل پشت به پشت (AC/DC/AC)
است.
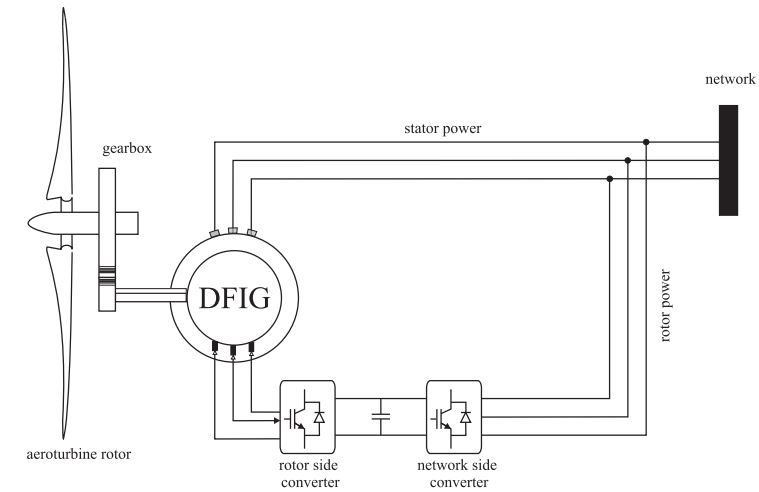
شکل 1) ژنراتور القایی دوبل تغذیه به همراه توربین بادی و مبدل پشت به پشت متصل به شبکه
مبدل
AC/DC/AC که بین سیم پیچهای روتور و شبکه قرارگرفته از دو مبدل منبع
ولتاژ VSC ، مبدل سمت روتور RSC و مبدل سمت شبکه GSC که به صورت پشت به پشت
به یکدیگر متصل اند تشکیل شده است. بین دو مبدل جهت برطرف کردن ریپل
ولتاژ و همچنین به منظور ذخیره انرژی از یک خازن استفاده می شود.
همچنین محور ژنراتور از طریق یک گیربکس به محور توربین بادی متصل است. نسبت
گیربکس به نحوی تنظیم می شود که سرعت نرمال ژنراتور القایی مطابق با
مقدار متوسط رنج سرعت روتور توربین بادی باشد. این کار برای مینیمم سازی
اندازه اینورتر انجام می شود که با رنج سرعت روتور تغییر خواهد کرد.
توربینهای
بادی انرژی جنبشی باد را به توان مکانیکی تبدیل می نمایند و این توان
مکانیکی از طریق شفت به ژنراتور انتقال پیدا کرده و در نهایت انرژی
الکتریکی تولید می شود. در این پست به طور مفصل در مورد پیشینه توربین صحبت
کردیم و در این پست نیز انواع پیکربندی توربین بادی و روشهای کنترل آن
را مورد بررسی قرار دادیم. به همین خاطر در اینجا از ذکر جزئیات در مورد
توربین خودداری کرده و شما را به صفحات مربوطه ارجاع می دهیم.
استفاده از ژنراتور القایی دوسو تغذیه به جای ژنراتورهای القایی در توربین بادی دارای مزایای زیر می باشد:
1.عملکرد با سرعت متغیر روتور در حالیکه فرکانس و دامنه ولتاژ تولید شده در مقدار ثابتی نگه داشته شده اند؛
2.بهینه سازی مقدار توان تولید شده به عنوان تابعی از مقدار باد در دسترس، نسبت به توان نامی خروجی ژنراتور؛
3.رفع مجازی تغییرات ناگهانی در گشتاور روتور و توان خروجی ژنراتور؛
4.تولید توان الکتریکی در سرعتهای پایین تر باد؛
5.کنترل ضریب توان (تولید توان راکتیو)
با توجه به توضیحات ارائه
شده و مزایای بیان شده در این نوشتار قصد داریم ضمن آشنایی با معادلات
ریاضی حاکم بر ساختار ، نحوه عملکرد و روش کنترل DFIG، یک شبیه سازی
کاربردی از آن را به همراه توربین بادی و مبدل پشت به پشت ارائه کرده و از
روش کنترل برداری کلاسیک برای کنترل مؤثر آن استفاده کنیم.
مدار معادل ژنراتور القایی دوسو تغذیه در چهارچوب مرجع سنکرون (dq)
معادلات ماشین الکتریکی در چهارچوب مرجع abc ارائه می شود اما معمولا برای
ساده سازی فرآیند کنترل این معادلات به چهارچوب های مرجع دیگری همچون
چهارچوب مرجع سنکرون یا چهارچوب مرجع ساکن منتقل می شود. در اینجا ما از
چهارچوب مرجع سنکرون یا dq0 استفاده می کنیم. بدین منظور می توان هر کدام
از بردارهای فضایی را بر اساس مؤلفه های افقی و عمودی آن بیان کرد. پس هر
کدام از سیم پیچی های فرضی توزیع شده روتور و استاتور را به صورت دو سیم
پیچ عمود بر هم همانند شکل 2 در نظر می گیریم:
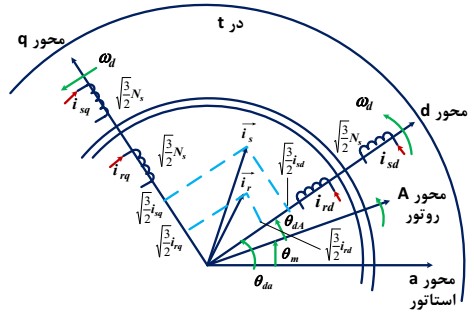
شکل 2) محورهای چرخشی استاتور و روتور در چهارچوب مرجع سنکرون
معادلات مربوط به جریانهای استاتور و روتور بر حسب جریان های سه فاز هر کدام به صورت زیر است:

در لحظه t ، محور d با زاویه θda نسبت به محور a استاتور قرار دارد.

روابط شار استاتور و روتور در چهارچوب مرجع dq به صورت زیر است:

که Ls اندوکتانس استاتور، Lr اندوکتانس روتور و Lm اندوکتانس مغناطیس
کنندگی است. معادلات ولتاژ استاتور و روتور در چهارچوب مرجع dq به صورت زیر
خواهد بود:

که Rs مقاومت استاتور، Rr مقاومت روتور، Lls اندوکتانس خودی استاتور، Llr اندوکتانس خودی روتور است. باید توجه داشت که:
همچنین در مورد پارامترهای سرعت خواهیم داشت:
که
ωd فرکانس زاویه ای سنکرون، ωm سرعت روتور بر حسب رادیان الکتریکی بر
ثانیه ، ωmech سرعت مکانیکی روتور بر حسب رادیان بر ثانیه و ωda فرکانس
زاویه ای لغزش است.
معادله مربوط به گشتاور از جمع گشتاورهای حاصل از محورهای d و q روتور حاصل
می شود:
که آنرا می توان به یکی از دو صورت زیر بدست آورد:
و معادله الکترودینامیکی ماشین القایی به صورت زیر نمایش داده می شود:
که J اینرسی معادل ژنراتور و B ضریب ویسکوز است. در نهایت مدار
معادل ماشین القایی در چهارچوب مرجع dq به صورت شکل 3 می باشد. در این شکل
همه متغیرها و پارامترهای الکتریکی به سمت استاتور رجوع داده شده اند.
توجه می کنیم که همه کمیتهای استاتور و روتور در چهارچوب مرجع چرخشی
سنکرون (چهارچوب dq ) هستند.

شکل 3) مدار معادل DFIG در چهارچوب مرجع سنکرون dq
مبدل پشت به پشت برای کنترل DFIG :
مبدل فوق از دو مبدل سمت روتور (RSC) و مبدل سمت شبکه (GSC) تشکیل شده که
از سمت DC توسط یک خازن به یکدیگر متصل هستند. وظیفه این مبدل، تبدیل
فرکانس می باشد؛ به طوریکه ولتاژ متناوب با فرکانس مشخص ابتدا به ولتاژ
مستقیم تبدیل شده و سپس مجدداً به ولتاژ متناوب با فرکانس مطلوب تبدیل می
گردد. با استفاده از روش کنترل مناسب، مبدل پشت به پشت قادر است تبدیل
فرکانس را از هر دو طرف انجام دهد.
دو مبدل فوق یکی به صورت اینورتر و دیگری به صورت یکسو کننده عمل می کند
که توسط یک لینک DC بهم متصل هستند. مبدلی که به ژنراتور متصل است، مبدل
سمت روتور (RSC) و مبدلی که به شبکه متصل است، مبدل سمت شبکه (GSC) نامیده
می شود. هر یک از این دو مبدل سه فاز، می تواند دو نقش یکسوسازی و
اینورتری را انجام دهد.
هنگامی که سرعت ژنراتور کمتر از سرعت سنکرون است، جریان توان از سمت شبکه
به سمت روتور می باشد و لذا GSC نقش یکسوکننده و RSC نقش اینورتر را ایفا
می کند. در شرایطی که سرعت ژنراتور بیشتر از سرعت سنکرون است، جریان توان
از سمت روتور به سمت شبکه می باشد و لذا RSC نقش یکسو کننده و GSC نقش
اینورتر را ایفا می کند. نحوه عملکرد سیستم و کنترل پالسهای اینورترها
توسط سیستم کنترلی اصلی مجموعه انجام می شود.
مدل توربین بادی مبتنی بر DFIG
مدل ژنراتور القایی دوبل تغذیه شامل قسمتهای مکانیکی، الکتریکی و مبدل
همراه با کنترل کننده است که در مجموع انرژی مکانیکی را از باد به انرژی
الکتریکی تبدیل می کند و سپس آن را به شبکه توان تزریق می کند.
الف)
مدل قسمت مکانیکی
قسمت مکانیکی DFIG شامل تجهیزاتی است که در معرض تیغه های توربین بادی و
مکانیزم فیزیکی آن قرار دارند و آن را هدایت می کنند (قطار درایو یا
گیربکس). با حضور باد با سرعت Vw، توان مکانیکی Pm تولید می شود که روتور
ژنراتور را هدایت میکند. قسمت مکانیکی می تواند بوسیله معادلات زیر شرح
داده شود:
![]()
که Tm گشتاور مکانیکی، چگالی هوا، A مساحت جاروب شده توسط تیغه توربین در
زمانی است که می چرخد و Cp ضریب توان مکانیکی است که می تواند به صورت
زیر محاسبه شود:
که λ نسبت رأس تیغه، R شعاع تیغه، λr متغیر مربوط به نوک تیغه میانی، ß
زاویه گام تیغه توربین و مقدارهای Ci (i=1:8 ) ثابتهای توربین هستند.
قانون علامت به گونه ای اتخاذ می شود که وقتی DFIG در حال تولید برق به
شبکه است (یعنی مد ژنراتوری) ، Tm منفی است، در حالیکه زمانی که آن توان
مصرف می کند (مد موتوری) Tm مثبت است.
با درنظر گرفتن یک مدل دو جرمه از قطار درایو، معادله زیر رابطه بین سرعت
روتور ، گشتاور مکانیکی Tm و گشتاور الکتریکی Te را نشان می دهد که مقدار
گشتاور الکتریکی در قسمت مربوط به بخش الکتریکی معرفی و محاسبه خواهد شد:
که
H اینرسی ژنراتور و F ضریب ویسکوز است. کنترل کننده زاویه گام همچنین بر
اساس سرعت روتور جهت حفاظت از گیرهای انتقال و ژنراتور القایی در نظر گرفته
می شود. یک کنترل کننده تناسبی برای زاویه گام در نظر گرفته می شود که
به صورت زیر است:
که ωd سرعت زاویه ای بیشینه است.
ب) قسمت الکتریکی
قسمت الکتریکی DFIG اساسا از ژنراتور القایی تشکیل شده است که توان
الکتریکی Pe و گشتاور الکتریکی Te در آن از تبدیل توان مکانیکی بدست می
آیند که آن نیز از توان بادی در مکانیزم توربین بادی استخراج می شود.
معادلات مربوط به قسمت الکتریکی و مدار معادل قبلا برای این قسمت توضیح
داده شده است.
قبل از پرداختن به قست کنترل مبدل ها، بهتر است به بررسی مختصر انواع روش
های کنترل DFIG بپردازیم.
روش های کنترلی DFIG :
سیستم کنترلی به همراه مدولاتور وظیفه تولید پالس کلیدهای مبدل مطابق با
مرجع مطلوب را بر عهده دارد. سه مورد از پرکاربردترین روشهای کنترل DFIG
شامل کنترل جهت دهی میدان (FOC)، کنترل مستقیم گشتاور (DTC) و کنترل
مستقیم توان (DPC) می شود.
روش مرسوم و کلاسیک کنترل برداری توانایی کنترل مستقل توان اکتیو و راکتیو
ژنراتور را فراهم می کند. این شیوه کنترلی بر پایه متغیرها در دستگاه مرجع
سنکرون است. روش کنترل برداری بر اساس تبدیل مدل سه فاز موتور القایی به
مدل دو سیم پیچ عمود بر هم و کنترل جریان این دو سیم پیچی بنا شده است.
این تبدیل به صورت تبدیل مدل سه فاز به مدل دو فاز dg دوار است. می توان
با جهت دهی مناسب شار، گشتاور را با مؤلفه عمودی جریان استاتور در دستگاه
dq یعنی iqs و مقدار شار را با مؤلفه افقی جریان استاتور در دستگاه dq ،
یعنی ids کنترل کرد. در قسمت شبیه سازی از روش کنترل جهت یابی میدان برای
فرآیند کنترل استفاده شده است.
کنترل مبدل ها
قسمت کنترل کننده – مبدل DFIG شامل کنترل کننده سمت روتور (RSC) و کنترل
کننده سمت شبکه (GSC) هستند که هر یک از تعدادی کنترل کننده PI تشکیل شده
و از طریق یک خازنی که لینک DC نامیده می شود، به هم وصل شده اند. در
حقیقت مبدلهای فرکانسی با مقادیر نامی کامل برای اتصال AC/DC/AC
ژنراتورهای توربین بادی به شبکه توان در این مکانیزم حضور دارند که تبدیل
سرعت را از سرعت روتور توربین بادی به فرکانس نامی شبکه بین گیربکس و مبدل
فرکانسی تسهیم می کنند. این منجر به کاهش تلفات کلی توان ایجاد شده با
تبدیل سرعت مکانیکی می شود. هدف GSC حفظ ولتاژ لینک DC در یک مقدار ثابت
صرفنظر از دامنه و جهت توان روتور است.
برای ایجاد کنترل مستقل توان اکتیو و راکتیو شارش شده بین شبکه و GSC، این
طرح کنترلی در چهارچوب مرجع ولتاژ استاتور انجام می شود. از طرف دیگر RSC
در چهارچوب شار متقابل برای بدست آوردن کنترل توان اکتیو و راکتیو می
باشد.
هدف کنترل توان این است که توان مکانیکی تولید شده توسط
توربین، مشخصه توان – سرعت خودش را دنبال کند و کنترل توان راکتیو بوسیله
تنظیم جریان راکتیو شارش شده در RSC بدست می آید. قانون تبدیل انرژی با
معادله زیر برای لینک DC ارائه می شود:
کنترل مبدل سمت
روتور:
این مبدل برای کنترل گشتاور DFIG از کنترل مستقیم جریان روتور استفاده می
کند. RSC این کار را با اعمال ولتاژ مناسب به سیم پیچ روتور انجام می دهد.
RSC تحت فرکانس های متغیر متناظر با تغییرات سرعت روتور که متناسب با
سرعت باد است، عمل می کند تا حداکثر توان از باد استحصال شود. همچنین در
عملکرد عادی، RSC توان راکتیو را برای روتور فراهم و بدین ترتیب ضریب توان
شبکه را کنترل می کند. این توان راکتیو باید از طریق استاتور که به شبکه
متصل است، فراهم گردد.
مبدل سمت روتور می تواند از یکی از کنترل کننده های گشتاور، سرعت و یا
کنترل کننده توان راکتیو برای تنظیم توان خروجی DFIG استفاده کند. به طور
معمول از یک کنترل کننده PI برای کنترل گشتاور، سرعت و یا توان استفاده می
شود. هر کدام از کنترل کننده ها که استفاده شود، می تواند خروجی مقدار
مرجع جریان روتور، گشتاور توان و سرعت خواسته شده را فراهم کند. سپس از یک
کنترل کننده PI دیگر برای کنترل خطای جریان روتور از مقدار مرجع استفاده
می شود. جریان روتور همچنین می تواند برای کنترل توان راکتیو تولیدی
ژنراتور استفاده شود. طرح کنترل RSC در روش کنترل برداری مرسوم در شکل 4
نمایش داده شده است. طرح کنترلی RSC در چهارچوب شار متقابل برای بدست
آوردن کنترل توان اکتیو و راکتیو می باشد.
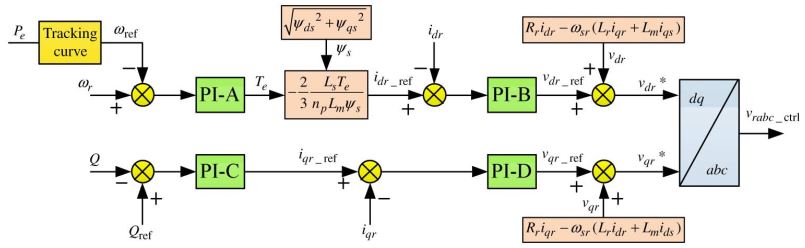
شکل 4) کنترل برداری مبدل سمت روتور یا RSC
در شکل 4، در حالت عملکرد نرمال، کنترل کننده RSC برای کنترل سرعت روتور و
خروجی توان راکتیو استفاده شده است. در اینجا مرجع توان راکتیو به مقدار
صفر تنظیم می شود به نحوی که خروجی توان راکتیو واقعی ژنراتور به مقدار
صفر کنترل شود. به عبارت دیگر ژنراتور توان راکتیو را نه از سیستم جذب کرده
و نه به سیستم تحویل می دهد.
کنترل مبدل سمت شبکه
این مبدل برای تنظیم کردن ولتاژ خط DC بین دو مبدل استفاده می شود. در
طول عملکرد عادی، GSC ولتاژ خط DC بین دو مبدل را با متعادل کردن توان
راکتیو در هر دو مبدل کنترل می کند. همچنین GSC قادر است توان تزریقی به
شبکه را به منظور کنترل ولتاژ شبکه کنترل نماید. این مزیت در هنگام رخدادن
خطا و پایداری ولتاژ شبکه مورد توجه قرار می گیرد.
GSC شامل یک حلقه کنترل بیرونی است که ولتاژ خط DC را کنترل می کند و تلاش
می کند تا آن در مقدار نامی نگه دارد. یک حلقه کنترل PI داخلی نیز جریان
GSC را کنترل می کند. از آنجایی که GSC به طور مستقیم به شبکه وصل می شود
توان خروجی آن باید تحت یک فرکانس ثابت متناظر با فرکانس شبکه باشد. طرح
کنترل GSC در روش کنترل برداری مرسوم در شکل 5 نمایش داده شده است. طرح
کنترلی GSC در چهارچوب مرجع ولتاژ استاتور انجام می شود.
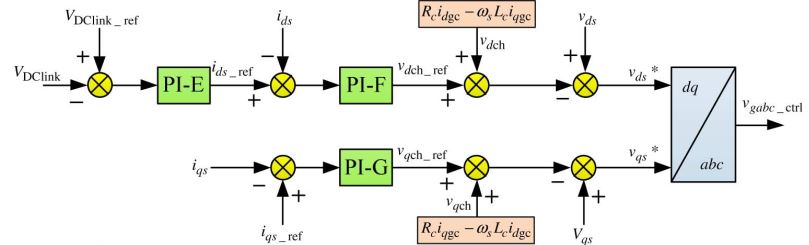
شکل 5) کنترل برداری مبدل سمت شبکه یا GSC
کنترل کننده گام
کنترل کننده گام برای تنظیم سرعت در ناحیه عملکردی با بار کامل استفاده
می شود. بالای سرعت نامی باد، توان خروجی تنظیم شده فقط متناسب با سرعت
روتور تغییر می کند، چون گشتاور ثابت باقی می ماند، بنابراین تنظیم توان
به طور کامل وابسته به تنظیم سرعت است.
هدف کنترل زاویه گام بهینه سازی استخراج توان از توربین بادی و همچنین
جلوگیری از تولید توان اضافه بر نامی در سرعت باد قوی است. طرح کنترل در
شکل 6 نمایش داده شده است:
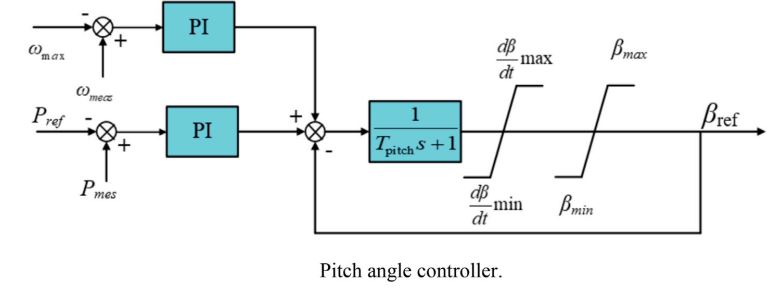
شکل 6) کنترل زاویه گام برای ژنراتور القایی دوبل تغذیه
این کنترل کننده از سه بخش تشکیل شده است:
کنترل سرعت گام
این قسمت مربوط به کنترل سرعت بوده و به کمک کنترل کننده PI انجام می شود.
جبرانگر
گام
این قسمت مربوط به کنترل توان اکتیو بوده و به کمک کنترل کننده PI انجام می
شود.
محرک گام
این قسمت نقش فیلترینگ، محدودسازی دامنه و نرخ تغییر و همچنین تثبیت گام
را انجام می دهد.
شبیه سازی و کنترل یک ژنراتور القایی دوبل تغذیه
در این قسمت یک ژنراتور القایی دوبل تغذیه با توان مکانیکی 1.5 مگاوات و
ولتاژ 400 ولت در نظر گرفته شده و فرآیند کنترل مؤثر آن در سیمولینک متلب
انجام شده است. پیکربندی ژنراتور به همراه توربین بادی، مبدلها، خازن لینک
DC، فیلترها و مدل شبکه توان در شکل 7 نشان داده شده است. توجه می کنیم
که اتصال سیستم توان بوسیله منبع ولتاژ سه فاز انجام می شود که با امپدانس
معادل تونن سری شده است.
یک فیلتر سلفی – مقاومتی اتصال مبدل شبکه را به نقطه اتصال مشترک برقرار
می کند. همچنین یک فیلتر خازنی نیز به صورت موازی بین نقطه اتصال مشترک و
منبع توان جهت کاهش هارمونیک ها متصل است.
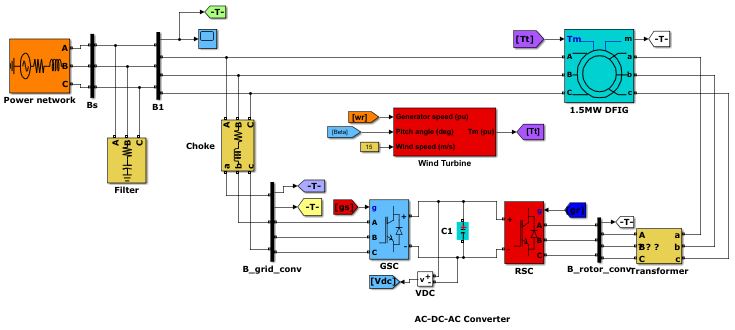
شکل 7) سیستم DFIG به همراه توربین بادی و مبدل AC/DC/AC
جزء مهم شبیه سازی سیستم کنترل آن می باشد که نمای کلی بلوک آن در شکل 8 نمایش داده شده است. کنترل کلی سیستم شامل بخشهای زیر است:
1)کنترل مبدل سمت شبکه
2) کنترل مبدل سمت روتور
3) کنترل زاویه گام توربین
توضیحات مربوط به هر یک از این قسمت ها
در بخش های قبل ارائه شده است. خروجی بلوک کنترل کلی سیگنالهای گیت برای
تحریک کلیدهای دو مبدل به صورت جداگانه و همچنین زاویه گام مناسب برای بلوک
توربین بادی است.
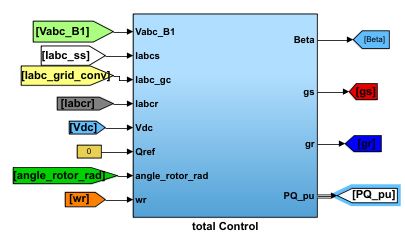
شکل 7) کنترل کلی سیستم شامل کنترل مبدل ها و زاویه گام توربین
مسئله مهم در کنار مدلینگ صحیح سیستم کنترل، تنظیم پارامترهای کنترل کننده
ها می باشد. در سیستم کنترل در مجموع 7 کنترل کننده وجود دارد که به
تعداد 6 تا از آنها از نوع تناسبی – انتگرالی و کنترل کننده دیگر از نوع
تناسبی است. این کنترل کننده ها به روش سعی و خطا در این شبیه سازی تنظیم
شده است.
بعد از تنظیم کنترل کننده ها به سراغ ران شبیه سازی و بدست آوردن نتایج
می رویم. زمان شبیه سازی در اینجا 3 ثانیه تنظیم شده است که در طی آن فرض
شده است که سرعت باد برابر با مقدار ثابت 15 متر بر ثانیه باشد. مقدار
مرجع توان راکتیو و مقدار مؤلفه جریان در راستای محور q برای مبدل سمت شبکه
برابر با صفر تنظیم شده است. در ادامه تعدادی از نتایج شبیه سازی ارائه
شده است.
در شکل 8 تغییرات توان اکتیو و راکتیو مبادله شده در نقطه اتصال مشترک
ارائه شده است. همان طور که مشخص است توان اکتیو در نهایت در مقدار حدودی
1.5 مگاوات به حالت ماندگار خود می رسد. از طرفی توان راکتیو نیز مرجع خود
را که مقدار صفر است، به خوبی دنبال می کند.

شکل 8) تغییرات توان اکتیو و توان راکتیو مبادله شده در نقطه اتصال مشترک
در شکل 9 تغییرات ولتاژ لینک DC و سرعت مکانیکی پریونیتی روتور ارائه شده
است. از نمودار اول مشخص است که تثبیت ولتاژ در مقدار 1150 ولت که مقدار
مرجع تنظیم شده در شبیه سازی بوده، به خوبی انجام شده است. همچنین از
نمودار دوم مشخص است که سرعت روتور بعد از کمی نوسان به مقدار ماندگار می
رسد. دلیل اینکه مقدار پریونیتی سرعت بیشتر از یک است به این خاطر است که
سرعت مرجع باد مقدار 15 متر بر ثانیه می باشد که از مقدار سرعت نامی
ژنراتور یعنی 11 متر بر ثانیه بیشتر است.

شکل 9) تغییرات ولتاژ لینک DC و سرعت پریونیتی محور روتور
در شکل 10 مشخصه ولتاژها و جریانهای سه فاز در نقطه اتصال مشترک در حالت
ماندگار ارائه شده است. با توجه به نمودار اول پیک ولتاژ در حالت ماندگار
به مقدار 565 ولت میرسد.

شکل 10) ولتاژها و جریان سه فاز در نقطه اتصال به شبکه (حالت ماندگار)


سیستم های قدرت مدرن برای عرضه توان قابل اطمینان به مصرف کننده و بارهای مختلف طراحی شده اند. نیروگاه های تولید برق به دلیل مسائل زیست محیطی، اقتصادی و ایمنی در مکانهایی دورتر از مصرف کننده قرار گرفته اند. بنابراین، شبکه خطوط انتقال برق در ولتاژهای خیلی بالایی برای انتقال توان به بهره برداری می رسند. علاوه بر انتقال توان به مصرف کننده، خطوط انتقال ممکن است باعث اتصال چندین شبکه قدرت بزرگ شوند که اصطلاحا به آن سیستم های قدرت بهم پیوسته می گویند. این امر جدا از پیچیدگی که در سیستم به وجود می آورد، باعث افزایش قابلیت اطمینان و همچنین مسائل مربوط به بازار برق می شود.
۲-۱- اساس کارکرد شبکه های انتقال توان
اکثر خطوط انتقال که بصورت AC هستند، تحت ولتاژهای مختلفی عمل می کنند. شبکه های توزیع در ولتاژهای پایین عمل میکنند در حالیکه شبکه های بزرگ دارای ولتاژهای بالایی هستند. خطوط انتقال با ولتاژهای مختلف توسط ترانسفورماتورها به یکدیگر متصل می شوند. خوشبختانه خطوط انتقال ac دارای خاصیت کنترل توان ذاتی هستند که توسط توان در ابتدا و انتهای خط تعیین می شود. بعنوان مثال، یک خط انتقال توان را در نظر بگیرید که بین یک نیروگاه و مصرف کننده قرار گرفته است که در شکل ۱ نشان داده شده است. با فرض اینکه خط بدون تلفات باشد (R=0) روابط زیر بر مدار حاکم است.
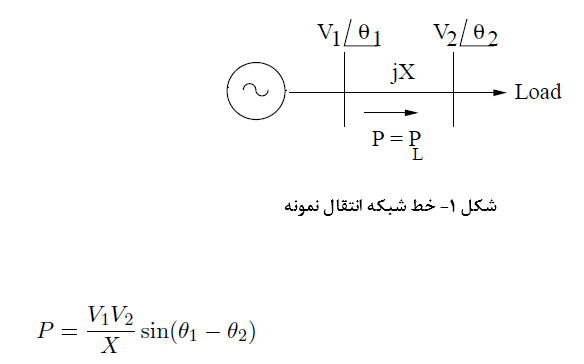
![]()
در رابطه بالا، X راکتانس سری خط است. V1 و V2 به ترتیب ولتاژ سمت ارسال و ولتاژ سمت دریافت می باشند. در رابطه بالا اختلاف زاویه ولتاژها میزان توان اکتیو انتقالی را مشخص می کنند و اختلاف دامنه ولتاژها میزان توان راکتیو انتقالی در خط را تعیین می کنند.
قابلیت اطمینان در سمت باسبار با اضافه کردن یک منبع تولید توان همانطور که در شکل ۲ نشان داده شده است قابل بهبود است. همانطور که در شکل ۱ مشاهده می شود، در صورتی که یکی از منابع یا خطوط انتقال از مدار خارج شود، تقاضای بار مصرف کننده توسط خط انتقال دیگر تامین می شود.
در کنار سیستم های انتقال ac، سیستم های انتقال توان HVDC نیز وجود دارند. سیستم های HVDC نیاز به مبدل های الکترونیک قدرت دارند که این باعث گران شدن این سیستم ها می شود. علاوه بر این، سیستم های HVDC برای فاصله های خیلی طولانی و سیستم های خیلی بزرگ استفاده می شوند. این سیستم انتقال توان از مبدل های پشت به پشت استفاده میکند. به این صورت که توان ac را ابتدا به dc تبدیل کرده و سپس این توان dc را به محل مورد نظر (انتهای خط HVDC) منتقل میکند و سپس دوباره در آنجا به ac تبدیل می کند.
۳-۱- کنترل سیلان توان در شبکه های انتقال ac
ما تمایل داریم سیلان توان در خطوط انتقال را برای افزایش ظرفیت انتقال توان کنترل کنیم و یا سیلان توان را تحت شرایط دینامیکی برای تضمین پایداری و امنیت سیستم تغییر دهیم. پایداری سیستم متأثر از افزایش یا کاهش کمی در فرکانس سیستم، نوسانات توان و فروپاشی ولتاژ می باشد. با توجه به شکل ۱، ماکزیم توان انتقالی در حالتی اتفاق می افتد که اختلاف زاویه ولتاژهای ابتدا و انتهای خط ۹۰ درجه باشد که در این صورت رابطه زیر برای انتقال توان ماکزیمم صادق است.
![]()
بطور مرسوم، جبرانسازی سری توسط خازن های سری در خط ماکزیمم توان انتقالی Pmax را افزایش می دهد. در این حالت مقدار خازن مورد نیاز برای جبرانسازی توسط رابطه زیر تعیین می شود.
![]()
![]()
در رابطه فوق Kse درجه جبرانسازی سری است. ماکزیمم مقدار Kse به عوامل زیادی بستگی دارد که مقاومت هادی یکی از آنها می باشد. بطور کلی Kse بیشتر از ۰٫۷ انتخاب نمی شود. استفاده از خازن های سری برای جبرانسازی در خطوط انتقال و افزایش ظرفیت خط انتقال از سال های دور استفاده شده است. با این وجود ۱۰ الی ۱۵ سال بعد، کنترل جبرانسازی سری با استفاده از تریستور برای کنترل سریع سیلان توان در خطوط انتقال معرفی شد. استفاده از راکتورهای کنترل شده تریستوری TCR که به صورت موازی با خازن های جبرانساز Xc قرار داشتند، علاوه بر کنترل جبرانسازی بر مشکلاتی از قبیل نوسانات زیرسنکرون غلبه می کرد. زیرا یکی از مشکلاتی که جبرانسازی سری در خطوط انتقال ایجاد می کند، نوسانات زیر سنکرون یا SSR است.
سیلان توان در خطوط با طول کوتاه توسط ترانسفورماتور شیفت فاز PST کنترل می شود که یک نسبت دور با دامنه واحد دارد. سیلان توان در یک خط انتقال بدون تلفات با یک PST بصورت زیر بیان می شود.

![]()
PST کنترل شده بصورت دستی تحت شرایط دینامیکی به اندازه کافی سریع نیست. کلیدهای تریستوری می توانند کنترل سریع مقایر گسسته را با توجه به ساختار PST استفاده شده تضمین کنند. همچنین، ماکزیمم توان انتقالی خط می تواند توسط ولتاژ سمت دریافت خط ac افزایش یابد. زمانیکه یک ژنراتور یک بار با ضریب توان واحد را تغذیه می کند، ماکزیمم توان زمانی اتفاق می افتد که مقاومت بار با مقاوت خط انتقال برابر باشد. قابل ذکر است که V2 با تغییر بار تغییر میکند و بصورت زیر بیان می شود.

![]()
با ارائه جبرانسازی دینامیکی توان راکتیو در باس بار (باس ۲)، همانطور که در شکل ۳ قابل مشاهده است، دامنه ولتاژ باس نیز قابل تنظیم است.
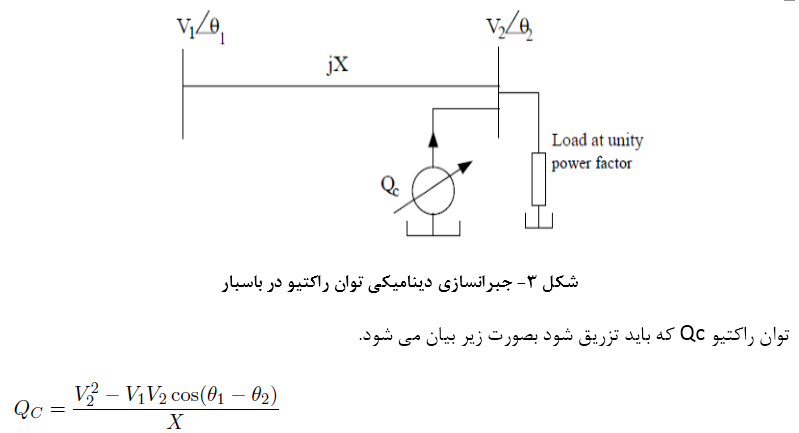
![]()
پایان سالها دانشاندوزی و چندین ترم دانشجویی و گذراندن واحدهای عمومی و اختصاصی با نگارش و ارائه یک پایاننامه پر و پیمان و کسب نمره عالی از آن شیرینترین خاطره دوران تحصیلی کارشناسی ارشد یا دکتری خواهد بود، اگر در انتخاب موضوع پایاننامه و کیفیت پژوهش خود دقت و هوشمندی به خرج دهیم و با رعایت اصول نگارش آن درست و استاندارد عمل کنیم. شاید در نگاه اول این مرحله از تحصیل دشوار بهنظر برسد، اما اگر در مسیر علاقهمندی و توانمندیمان پیش برویم، راه بر ما هموار و آسان خواهد شد. بنابراین لازم است ده نکته مهم و ضروری را در انتخاب موضوع پایاننامه در نظر بگیریم.
نخستین گام برای آغاز این مسیر، که مهمترین آن برای انتخاب موضوع پایاننامه است، علاقه است. علاقه به موضوعی خاص انگیزه مطالعه جدی و عمیق شما در زمینه پژوهش خواهد بود و از دلسردی و خستگیتان برای ادامه کار طولانی تحقیق جلوگیری خواهد کرد. پس با در نظر گرفتن علایقتان شروع به جستجو کنید.
نخستین گام عملی در انتخاب موضوع پایاننامه مطالعه است؛ منابع اطلاعاتی مختلف را شناسایی کنید؛ کتاب، ژورنال، اینترنت و... برای یافتن منابع بهتر میتوانید به پایاننامههای گذشته نیز رجوع کنید تا از پیشنهادهای پژوهشگران پیشین برای رسیدن به منابع اصلی حوزه تخصصیتان آگاه شوید و سریعتر بتوانید فهرستی از بهترین و معتبرترین منابع قابل استناد تهیه کنید (معمولا در آخرین فصل پایاننامهها بخشی به نام «پیشنهادهایی برای پژوهشهای بیشتر» وجود دارد). البته امروزه اینترنت جستجوی هر دیتایی را آسان کرده و سرعت دستیابی به نتیجه دلخواه را بهشدت افزایش داده است. یکی از بهترین و سادهترین موتورهای جستجو برای دسترسی به مقالات، Google Scholar است که با جستجوی کلمات کلیدی در آن بهراحتی میتوانید به نتیجه برسید. فراموش نکنید که با دنبال کردن اخبار روز و پیگیری موضوعات همایشها و سمینارهای مرتبط با حوزه تخصصیتان میتوانید بهروزترین مسائل را پیدا کنید و از نو و جذاب بودن موضوع پایاننامهتان مطمئن شوید. همچنین میتوانید با مراجعه به پایگاههای مربوط به پژوهشهای جاری و وبسایتهای دانشگاههای معتبر دنیا فهرست پایاننامههای گذشته را مرور کنید و منابع به کار برده شده در آنها را بشناسید. در طول جستجو و بررسی منابع از یادداشت کردن نکات مهم و جالب و تهیه فهرست از موضوعاتی که به ذهنتان میرسد، غافل نشوید.
در پایان این مرحله شما حجم بسیار زیادی از اطلاعات درباره موضوعات مورد علاقهتان را در اختیار دارید، پس لازم است ریزبینی و دقت بیشتری به خرج دهید و با بررسی بیشتر به انتخاب نهایی نزدیکتر شوید.
حوزه تخصصی خودتان را مشخص کنید؛ حوزهای که ضمن علاقه به آن، از تسلط و توانایی کافی برای تجزیه و تحلیل و ارتباط با جامعه مورد تحقیق برخوردار باشید. حوزههای گوناگون را بررسی کنید و موضوعی را انتخاب کنید که درباره آن اطلاعات و مطالعه نسبتا خوبی تاکنون داشتهاید تا مجبور نباشید زمان زیادی برای آشنایی اولیه و لازم با موضوع صرف کنید.
انجام شبیه سازی و پایان نامه در زمینه میکروگرید شماره تماس 09906118613
این مقاله، نقشی را که یک سیستم ذخیره یACمی توانددر کنترل فرکانس و ولتاژ میکروگرید ایفا نماید، بررسی میکند. میکروگرید مورد مطالعه، بخشی از یک شبکه ی توزیع شعاعی با ولتاژ متوسط است و شامل دو نوع واحد تولید پراکنده می باشد؛ واحدهای گازی و یک واحد فوتوولتاییک .با توجه به نوع واحدهای تولیدی موجود در میکروگرید، از یک سیستم ذخیره یACاستفاده شده است تا با به کارگیری یک طرح کنترل اولیه ی فرکانس و ولتاژ، رفتار دینامیکی میکروگرید به گونه ای تغییر یابد که نیاز بارهای حساس درون میکروگرید برآورده شود. دو سناریوی مختلف در قالب جزیره سازیِ برنامه ریزی نشده و جزیره سازی عمدی در نظر گرفته شده اند تا پاسخ میکروگرید به اغتشاش های وارده بررسی شود. در نهایت رفتار دینامیکی میکروگرید، با حالتی که میکروگرید فاقد سیستم ذخیره یACباشد مقایسه شده است. نتایج شبیه سازی نشان می دهند که سیستم ذخیره یACو طرح کنترل آن، به خوبی پاسخگوی معیارهای لازم برای بارهای حساس می باشد
انجام شبیه سازی و پایان نامه میکروگرید و تولیدات پراکنده شماره تماس 09906118613
در سالهای اخیر توجه جهانی به استفاده هر چه بیشتر از منابع انرژی تجدیدپذیر جهت تولید برق معطوف گشته است. در این مقاله ضمن معرفی جزیره شدن و اینکه عدم شناسایی جزیره باعث بوجود آمدن یک وضعیت نامطلوب و خطرناکی برای نیروهای تعمیرات و تجهیزات می شود، پرداخته شده است. خروج مولدهای DG از وضعیت سنکرون ، اولین نتیجه پس از وقوع جزیره شدن هست که شبکه هوشمند می تواند این حالت را تشخیص داده و باعث افزایش اطمینان سیستم شود. ریزشبکه، یک شبکه هوشمند در مقیاس کوچک تر می باشد که تجمعی از بارها و تولیدکننده ها است و می تواند به طور جزیره ای و یا متصل به شبکه کار کند. می توان تعداد زیادی از منابع تولید پراکنده کوچک از قبیل سلولهای فتوولتائیک ، باد را در شبکه برق هوشمند بکار برد. . با افزایش تلرانس خطا و تشخیص حالت جزیره ای ، شبکه هوشمند ارتباطی امن تر و قابل اطمینان تر از واحد های تولید پراکنده را با شبکه فراهم می کند . انرژی باد از مقبولیت بیشتری برخوردار است که این امر به علت هزینه ی پایین تر تولید برق از انرژی باد نسبت به سایر انرژی های تجدیدپذیر و نیز ظرفیت های بالای تولید برق در مزارع بادی می باشد . شبکه هوشمند می تواند با یک سیستم کنترلی تجهیز شود تا توان خروجی مزارع بادی را کنترل کرده و تاثیر نوسانات بادی روی پایداری و فرکانس شبکه را تعدیل نماید . استفاده از اتوماسیون و سیستم های کنترل هوشمند می توانند راه هایی جهت کاهش خطا و بالابردن قابلیت اطمینان باشد .
2- ترجمه مقالات تخصصی
3- انجام شبیه سازی ها با نرم افزارهای مهندسی
Matlab, Maxwell, Pspice ، PLC ، Altium designer، Digsilent, Pscad ,Eplan
4- مقاله شبیه سازی شده برای درس تئوری جامع ماشین الکتریکی ، الکترونیک قدرت 1 و 2 ، طراحی مبدل الکتریکی، طراحی ماشین الکتریکی، کنترل فازی، کنترل محرکه الکتریکی و سایر دروس کارشناسی و کارشناسی ارشد برق
همین امروز با ما تماس بگیرید!
![]()
telegram: powerelectronic4u
Email:
![]()
Instagram:powerelectronic4u