ترایاک
ترایاک( TRIAC -( Triode for Alternating Current: قطعهای الکترونیکی است که در صورت فعالشدن (تریگر) میتواند جریان الکتریکی را در هر دو جهت از خود عبور دهد. ترایاک عملکردی مانند تریستور اما بصورت دو طرفه دارد. ترایاک را میتوان دو تریستور مکمل (که یکی توسط آند و دیگری توسط کاتد تریگر میشود) مدل کرد که بصورت موازی اما در جهت برعکس به هم متصل شدهاند و گیت آنها نیز به یکدیگر متصل شده است. ترایاک از شش قطعه p و n ساخته شده و دارای 3 پایه است ، ازترایاک برای کنترل جریان متناوب استفاده می شود وانتخاب آن برحسب ولتاژ و آمپراست و دراندازه های گوناگون وجود دارد. ترایاک میتواند با ولتاژ مثبت یا منفی که به پایهٔ گیت آن اعمال می شود، تریگر شود. (ولتاژ گیت نسبت به پایهٔ A1 که MT1 نیز خوانده میشود سنجیده میشود)، یا یک پالس فعالسازی به پایهٔ گیت، ترایاک به شرایط هدایت میرود و تا زمانی که جریان عبوری از حد مشخصی پایینتر نیاید در همان شرایط باقی میماند. این جریان مرزی را جریان نگهدارنده میگویند.

این اتفاق میتواند در انتهای هر نیم سیکل از یک جریان متناوب (مانند برق شهر) رخ دهد. این خاصیت باعث شده است که ترایاک یک سوئیچ پراستفاده در مدارات AC شود که میتوان با آن جریانهای الکتریکی بسیار بالا را توسط یک جریان ضعیف کنترل کرد. ترایاک کاربردهای فراوانی دارد مانند : دیمرها ، مدارات کنترل دستگاه های خنک کننده ، بعضی ازمحافظ های یخچال و فریز که به جای رله از ترایاک استفاده می شود وهمچنین درمدارکنترل پنکـه هایی که کنترل از ر اه دور دارند و ….، ترایاک نوع نوری هم وجود دارد که گیت آن به نورحساس است، ترایاک مانند یک والو دو طرفه است چون هردو نیم سیکل موج را عبورمی دهد ، با توجه به توضیحات بالا، برای درمدارقراردادن یک ترایاک کافی است پایه گیت را شناسایـی کنیم ، گیت باید جایش درمدار ثابت و مشخص باشد ولی جای دوپایه دیگررا می توان با هم جابجا نمود .

نماد ترایاک:

با اعمال پالس در یک نقطهٔ خاص کنترل شده، میتوان درصد جریان عبوری از بار را تحت کنترل درآورد که به این تکنیک کنترل فاز میگویند. بر خلاف دیاک، در ترایاکها پایههای آند ۱ و آند ۲ با هم تفاوت دارند و جهت قرارگرفتن آنها در مدار مهم است. ترایاکها به چهار روش فعال میشوند که به این روشها درجهٔ حساسیت ترایاک میگویند. درجهٔ حساسیت اول بهترین روش برای فعالکردن ترایاک است و بهتر است از درجهٔ حساسیت چهارم استفاده نشود. در درجهٔ حسایست اول آند ۲ نسبت به آند ۱ ولتاژ مثبت دارد و گیت با اعمال پالس مثبت نسبت به آند ۱ تحریک میشود. در درجهٔ حساسیت دوم آند ۱ از آند ۲ مثبتتر است و گیت با ولتاژی پایینتر از آند ۱ تحریک منفی میشود. در درجهٔ حساسیت سوم آند ۲ مثبتتر از آند ۱ است و آند ۱ نیز نسبت به گیت مثبت است (گیت تحریک منفی میشود). در درجهٔ حساسیت چهارم آند ۱ از آند ۲ ولتاژ مثبتتری دارد و گیت با ولتاژ مثبت نسبت به آند ۱ تحریک میشود.

منحنی مشخصه ترایاک

ربات بازرسی خطوط انتقال
خطوط برق پرقدرتی که از نقاط دور از دسترس می گذرند، هر از گاهی باید بازرسی شوند تا خطر قطع شدن توسط رشد درختان یا دیگر مشکلات بالقوه برای آنها وجود نداشته باشد. در این نقاط دوردست که بازرسی آن با هلیکوپتر گران قیمت امکانپذیر است، رباتی که بتواند تمام خطوط پرقدرت برق را طی کند و تصاویر آنرا برای مرکز بفرستد. یکی از اختراعات جالب برای مهندسان برق خواهد بود. ربات های بازرسی انتقال نیرو دارای هزینه کمتر از 1000 دلار آمریکا می باشند. یک نمونه از این ربات، به نام SkySweeper است که در دانشگاه کالیفرنیا (UCSD) دانشکده جیکوبز در نمایشگاه تحقیقات مهندسی ارائه شد. این ربات از قطعات الکرونیکی و پلاستیکی چاپ بر روی یک پرینتر سه بعدی ارزان قیمت ساخته شده است.

بازرسی خطوط انتقال نیرو و دیگر موارد مشابه، اغلب کاری طولانی، دشوار، و خطرناک می باشند. کارگران را برای کار، بر روی کابل های فشار بالا می فرستند، برای مثال به منظور خاموش کردن نیرو یا به کارگیری باله پیچیده از هلیکوپتر. با این حال، ربات هایی که قادر به بازرسی های سیم انتقال نیرو می باشند نیز وجود دارند، اما دارای معایب متمایزی می باشند. Nick Morozovsky، دانشجوی کارشناسی ارشد در رشته مهندسی مکانیک می گوید:" ربات های بازرسی خطوط فعلی، بزرگ، پیچیده و گران قیمت است. شرکت های گاز نیز ممکن است از هلیکوپتر سرنشین دار یا بدون سرنشین مجهز به تصویربرداری مادون قرمز برای بازرسی خطوط استفاده نمایند". "این بسیار ساده است".

دنباله ای از بیت که مانند یک ماشین برای انبار کردن کابل است، طراحی فعلی V شکل است و از یک محور موتور " elbow"(آرنج) در وسط آن استفاده شده. محور elbow، بازویی است که دارای یک انبرک در انتها می باشد که به طور مداوم به کابل ها، به موازات حرکت آهسته ربات، چنگ انداخته و رها می کند. Morozovsky، در حال کار برای افزایش قدرت انبارک انتهایی می باشد که به نوسان انتها در انتها اجازه دهد، طوری که می توانید از نوسانات نقاط قبلی کابل پشتیبانی نماید.در حالی که قدرت موتور elbow، توسط باتری تامین می شود، Morozovsky می گوید: این امکان وجود دارد که ربات به سیم پیچ القایی مجهز کنیم، طوری که می تواند با طور نامحدود، توسط خطوط انتقال، نیروی خود را پیگیری نماید.

فیبر نوری
فیبر نوری (optical fiber) یک محیط انتقال برای مخابره کردن اطلاعات توسط نور است .جنس این کابل بسیار مشابه شیشه است با این تفاوت که این کابل انعطاف پذیر است و ساختار آن به صورت استوانه هایی از داخل شفاف و در محیط ،کدر است ،ضحامت این فیبر به اندازه ی موهای سر می باشد. پهنای باند این کابل تا بالای 10Gbps می رسد هرسیستم فیبر نوری به یکی از سه صورت زیر می باشد: - single mode fiber (فیبر حالت یکتا):پر کاربرد ترین حالت برای ارسال و دریافت اطلاعات در مسافت های دور استفاده می باشد. - step index multi mode fiber(فیبرحالت چندگانه ی شاخص پله): روشی است که اکنون برای مسافت های دور منسوخ شده است. - graded multi mode fiber (فیبر حالت چندگانه ی درجه بندی شده) : برای مسافت های کوتاه و متوسط مصرف می شود. سیستم رله ی فیبر نوری برای آگاهی ازاز نوع و عملکرد سیستم های مخابراتی می باشد که به طور کلی در بخش مخابراتی به بخش های زیر تقسیم می شود: -فرستنده:در ابتدا سیگنال ارسالی رمز گذاری یا کدگذاری می شود تا ارسال آن ممکن شود. - بازتاب کننده نوری: با توجه به تضعیف سیگنال ارسالی در طول مسیر به منظور تقویت سیگنال ارسالی از این قسمت در سیستم های نوری استفاده می شود. -گیرنده نور: زمانی که سیگنال حاوی اطلاعات دریافت شد باید این سیگنال ازحالت کدگذاری شده خارج شودکه این عمل در این بخش صورت میگیرد.

قسمت های مختلف یک کابل فیبر نوری به سه بخش عمده ی زیر تقسیم می شود: - هسته شیشه ای: بخش اصلی کال فیبر نوری است این بخش بسیار شفاف است تا پرتو های نوری با کمترین خطا و بیشترین سرعت از آن عبور کنند-روکش یا غلاف شیشه ای: جنس این بخش هم مشابه هسته از شیشه است با این تفاوت که ضریب شکست آن متفاوت با هسته است و به منظور برگشت برخی شعاع های نوری خارج شده از هسته است. -بافر رویه یا شیلد پلاستیکی :روکشی است از جنس پلاستیک که به منظور محافظت کابل از تعییرات دما و رطوبت و سایر پارامتر های محیطی استفاده می شود. مراح ساخت فیبر نوری به ترتیب به صورت زیر است: -صیغل گرمایشی:در این مرحله هسته ی شیشه ای از لوله ای حاوی گاز های کلر و اکسیژن که دمای ان بالای 1800 درجه ی سانتی گراد است،به منظور صاف و صیغلی شدن سطح هسته عبور داده می شود. - اضافی: در این مرحله نیز با عبور دادن هسته از گاز های فریون ،کلر و اکسیژن ترک خوردگی ها و شکاف ها ی شیشه از بین میرود. -لایه نشانی کردن بخش روکش: در مرحله ی لایه نشانی ماده تتراکلرید سیلیسیوم و اکسی کلرید فسفریل در حالت گاز و هلیم وارد لوله ی شیشه ای می شود و یک مشغل با سرعت ی حدود200 میلی متر بر دقیقه برروی طول لوله حرکت می کند، این عمل باعث افزایش دما تا بالا تر از 1900درجه ی سانی گرادمی شود که بر اثر تعییرات ناگهانی دما ،ذرات به سورت رسوب روی جداره ها می چسبند و سطح شیشه یکنواخت مطابق با ساختار اولیه می شود.

یکی از مهم ترین مزایای این کابل نسبت به کابل های فلزی به شرح زیر است: -به دلیل کم بودن مقاوت طول مسیر نسبت به کابل های مسی و آلمینیومی سرعت انتقال اطلاعات (Bit rate) بیشتر میشود.-طول عمر طولانی تر -حساسیت بالا -پاسخگویی سریع -نویز کم از معایت آن می توان انعطاف پذیری کمتر نسبت به کابل های مسی اشاره کرد. برای یک منبع نور برای محیط فیبر نوری لازم است که با توجه به توزیع واگرایی نور برای جلوگیری از ایجاد پاشیدگی نور بهتر است از نور تک فام یا تک فرکانس استفاده کنیم که مناسب ترین ابزار ،دیود لیزری یا همان لیزر است. از فیبر نوری می توان در برنامه های صنعتی، مخابراتی، فضایی ، کامپیوتری ،دارویی، معادن، نظامی و.. استفاده کرد.

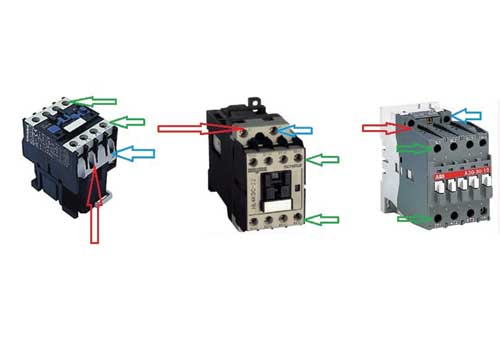
شماره پایه های کنتاکتور
کنتاکت های اصلی (قدرت) هر کنتاکتور را با یک عدد یک رقمی مشخص می کنند به این ترتیب که ورودی تیغه ها با اعداد 5,3,1 و خروجی آن ها با اعداد 6,4,2 نمایش داده می شوند .کنتاکت های فرعی (فرمان) کنتاکتور به دو روش مشخص می شوند.در هر دو روش کنتاکت های فرمان با اعداد دو رقمی مشخص می شوند.

در روش اول عدد سمت چپ معرف موقعیت و ترتیب کنتاکت ها در کنتاکتور می باشد به عبارت دیگر عدد سمت چپ معرف چندمین کنتاکت کنتاکتور است.و رقم سمت راست اگر 1 و 2 باشد به معنی بسته بودن و اگر 3 و 4 باشد به معنی باز بودن کنتاکت است. در روش دوم»کنتاکت های باز دسته بندی می شوند و جداگانه شماره می گیرند لازم به ذکر است که کنتاکت های قدرت بی متال مانند کنتاکتور ها با اعداد تک رقمی مشخص می شوند .

در قدیم تعداد کنتاکت های بسته و باز یک کنتاکتور بر روی پلاک با استفاده از حروف ö و S مشخص می نمودند.مثلا اگر بر روی کنتاکتور نوشته میشد 1S+3ö به این معنی بود که کنتاکتور دارای یک کنتاکت باز و سه کنتاکت بسته می باشد. امروزه برای نشان دادن تعداد کنتاکت های فرمان از یک عدد دو رقمی که به همراه شماره تیپ کنتاکتور نوشته می شود استفاده می کنند.مثلا برای کنتاکتور ذکر شده به جای 1S+3ö عدد 13 نوشته می شود که رقم سمت راست تعداد کنتاکت های بسته فرمان و رقم سمت چپ تعداد کنتاکت های باز فرمان را نشان می دهد.اگر کنتاکتور مثلا فقط دارای دو کنتاکت باز باشد با عدد 20 و اگر تنها دارای دو کنتاکت بسته باشد با عدد 02 مشخص می شود.
به عنوان مثال در کنتاکتور HL 10/82/E تعداد کنتاکت های باز 8 عدد و تعداد کنتاکت های بسته 2 عدد می باشد. لازم به ذکر است که کلیه وسایلی که با دست فرمان میگیرند مانند شستی های استب و استارت و یا به طور مکانیکی فرمان می گیرند مانند میکرو سوئیچ ها با اعداد تک رقمی مشخص می شوند و برای کنتاکت های بسته این وسایل از اعداد 1 ,2 و برای کنتاکت های باز آنها از اعداد 3,4 استفاده می شود.هرگاه از یک نوع وسیله زیاد استفاده شود به حروف مشخص کننده وسیله اندیس داده می شود.
استاندارد رنگ سیم برق
معمولا برای راحتی شناسایی فازهای یک سیستم قدرت، آنها را با رنگهای مختلفی مشخص میکنند. این کار مزایای زیادی دارد. به عنوان مثال هنگام تقسیم بار بین فازها اگر رنگ فازها متمایز نباشد، شناسایی فازها را برای تقسیم بار دشوار خواهد ساخت. از طرفی پیدا کردن طریقهی صحیح اتصال فازها به یک موتور القایی را بدون نیاز به آزمایش امکان پذیر میسازد. معتبرترین استانداردی که برای این کار وجود دارد استاندارد IEC 60446 است. ولی متاسفانه این استاندارد چندان جدی گرفته نمیشود و عملا سیستم رنگهای مختلفی ممکن است در کارهای غیر حرفهای استفاده شوند.

طبق استاندارد آیایسی، استفاده از این رنگ بندی برای جلوگیری از اشتباهات و اطمینان از عملکرد مطمئن سیستم در موارد زیر توصیه شده است: - در رنگ روکش کابلها (cables)- در سیمهای داخلی کابلهای چند سیمه (cores) - باسبارها یا همان شینههای مسی (busbars) - سایروسایل الکتریکی و عایقبندیها همان طور که میدانید اصل استانداردهای IEC به طور وسیع در دسترس نیست و باید هر قسمتی را که میخواهید خریداری کنید و این کار را خیلی دشوار میکند. با این حال برخی از قسمتهای این استاندارد در کتابها و سایتهای مختلف انتشار یافته و میتوان به مفاد آن پی برد. طبق استاندارد IEC استفاده از رنگهای زیر برای شناسایی فازها مجاز دانسته شده است: - سیاه - قهوهای - قرمز - نارنجی - زرد - سبز - آبی - بنفش - خاکستری - سفید - صورتی - فیروزهای البته استفاده از رنگهای سبز و زرد به صورت جداگانه، تنها زمانی مجاز دانسته شده است که این رنگها باعث سردرگمی برای تشخصیص سیم زمین (که معمولا به رنگ زرد و با نوار سبز کشیده میشود) نشوند. ترکیب این رنگها نیز مجاز دانسته شده است ولی رنگهای سبز و زرد نباید در هیچکدام از این ترکیبات استفاده شوند مگر برای سیستم حفاظتی.

کاربرد رنگها هادی نوترال یا نول اگر مداری شامل نقطهی نوترال یا نول باشد، آنگاه هادی آن باید با رنگ آبی مشخص شود (ترجیها آبی روشن). و رنگ آبی روشن نباید برای هیچ یک از هادیهای دیگر استفاده گردد. هادی سیستم حفاظتی (زمین) ترکیب رنگهای زرد/سبز همواره و به صورت گسترده برای شناسایی هادی حفاظتی به کار میرود. همهی قسمتهای هادی حفاظتی که طولی حداقل معادل ۱۵mm داشته باشد، باید توسط این دو رنگ به گونهای مشخص شود که یک رنگ بین ۳۰% تا ۷۰% سطح هادی و رنگ دیگر بقیهی آن را در برگیرد. هادی PEN هادی PEN هادیای است که شامل دو هادی PE (زمین حفاظتی ) [Protective Earth] و N (نول) میباشد. معمولا این هادی در مسافت بین پستها تا خانههای مسکونی استفاده میشود که در آنجا هادیهای PE و N آن از هم جدا میشوند. در انگلستان این سیستم را به نام Protective multiple earthing ) PME) نیز میشناسند، که علت اتصال مکرر هادی نوترال/زمین به زمین واقعی است که خطر قطعی نوترال را کاهش میدهد. همین سیستم در استرالیا به نام multiple earthed neutral) MEN) شناخته میشود. هادیهای PEN عایقدار، یا باید با رنگهای زرد/سبز در امتداد آنها به همراه علامتهای آبی در دو انتها مشخص شوند، یا باید طول آنها را با آبی روشن مشخص نمود و در دو انتها از مارکهای زرد/سبز استفاده نمود.

ایران طبق استاندارد شمارهی ۶۳۱۰۲ دفتر استانداردهای وزارت نیرو در ایران (رنگ و پوشش تجهیزات صنعت برق – رنگ ظاهری)، فازهای R و S و T باید به ترتیب قرمز، زرد و آبی آسمانی باشند. البته رنگ بندی مطابق استاندارد چین (زرد، سبز، قرمز) هم رایج است. امریکا، کانادا و ژاپن در این سه کشور در استاندارد IEC اجازهی استفاده از رنگهای دیگری در پی نویسهای داده شده است. - رنگ خاکستری یا سفید برای سیم نول (به جای آبی کمرنگ) - سبز برای هادی حفاظتی (به جای زرد-سبز) انگلستان طبق استاندارد بریتانیایی BS 7671 استفاده از استاندارد IEC 60446 در سال ۲۰۰۱ کنار گذاشته شده است. تغییرات آن به این صورت است که علاوه بر استاندارد IEC، میتوان از رنگ خاکستری برای مشخص کردن فازها استفاده کرد که به علت گستردگی استفاده از این استاندارد در اروپا انتظار میرود در ورژن آیندهی IEC 60446 این مورد نیز گنجانده شود. شماره گذاری اگر هادیها علاوه بر رنگ با شماره نیز مشخص میشوند، این شمارهها باید توسط ارقام عربی نوشته شوند. زیر شمارههای ۶ و ۹ حتما باید خطی کشیده شده باشد که با هم اشتباه نشوند. در ضمن هادیهای زرد-سبز هرگز شماره گذاری نمیشوند. توجه داشته باشید که در عمل ممکن است با سیستمهایی روبهرو شویم که از هیچ استانداردی پیروی نمیکنند یا حتی ممکن است در یک سیستم استفاده از چندین استاندارد مختلف مشاهده شود.

بزرگراه الکتریکی
یک شرکت آلمانی قصد دارد به طور آزمایشی ۱۰ کیلومتر از جاده های این کشور را به بزرگراه الکتریکی تبدیل کند. شرکت زیمنس نخست در سال ۲۰۱۲ طرح اولیه eHighway (بزرگراه الکتریکی) را رونمایی کرد. در این طرح کامیون های هیبرید الکتریکی – گازوئیلی می توانند با استفاده از پانتوگراف هایی خاص (دستگاهی که برق را از کابل به وسیله نقلیه منتقل می کند) از کابل های برق فشار قوی نیرو بگیرند و فقط با نیروی برق حرکت کنند.

سال گذشته این پروژه از مرحله آزمایش به اجرا رسید و ۲ کیلومتر از جاده های عمومی خارج از استکلهم به این فناوری مجهز شدند. اکنون زیمنس اعلام کرده قصد دارد طرح مشابهی را برای ۱۰ کیلومتر از اتوبان A۵ آلمان اجرا کند. این طرح آزمایشی تا پایان سال آتی میلادی تکمیل می شود. طبق برنامه ریزی ساخت و نگهداری این سیستم به عهده زیمنس و مدیریت کلی پروژه به شرکت هسن موبیل تعلق دارد که وظیفه نظارت برجاده ها و مدیریت حمل و نقل در ایالت را برعهده دارد.

به گفته یکی از مقامات این شرکت، سیستم مذکور برای شبکه های واقعی حمل و نقل به کار رفته و ثابت شده تاثیری بر آب و هوای منطقه ندارد. در بزرگراه های الکتریکی کابل های برق فشار قوی هوایی، الکتریسیته ملزوم را برای خودروهای هیبریدی حمل بار فراهم می کنند. هنگامی که کامیون زیر این خطوط حرکت می کند، سوخت آن فقط از طریق الکتریسیته تامین می شود و پس از گذر از کابل ها، با گازوئیل حرکت می کند.

پایه و اساس این سیستم یک پانتوگراف هوشمند تلفیق شده با سیستم رانندگی هیبریدی می باشد. سیستم سنسور به پانتوگراف امکان اتصال یا انفصال از خط بالاسری را با سرعت بیش از 56 (mph(90km/h می دهد. کامیون های مجهز با سیستم فوق، توان خود را از سیم های زنجیره بالاسری در زمان رانندگی به دست می آورند و این به آن ها امکان جا به جایی کارآمد و میزان انتشار دی اکسید کربن صفر را می دهد. به دلیل سیستم هیبریدی، عملیات خارج از خط تماس نیز امکان پذیر است، از این رو امکان حفظ انعطاف پذیری کامیون های قدیمی وجود دارد. فناوری بزرگراه الکتریکی دارای یک پیکر بندی باز است، از این رو سیستم هایی با توان گاز طبیعی یا باطری به عنوان جایگزینی برای سیستم رانندگی هیبریدی دیزلی مورد استفاده در سیستم راهنمایی رانندگی سوئد در نظر گرفته می شود.

آسانسور بدون کابل
رویاهای حرکت در داخل ساختمان در جهت های مختلف و بدون دردسرهای آسانسورهای فعلی به واقعیت پیوست. به تازگی آسانسورهایی تولید شدند که با استفاده از موتورهای خطی، به سمت راست و چپ و پایین و بالا و بدون نیاز به کابل و فضاهای اضافی، حرکت می کنند. ThyssenKrupp اولین بار این ایده را سه سال پیش در یکی از بزرگترین شرکت های تولید کننده آسانسور در دنیا به نام mehlev مطرح کرد. این آسانسورها از تکنولوژی حرکتی Hyperloop برای جابجایی استفاده خواهند کرد.

همانطور که مشاهده می کنید، در این آسانسورها به هیچ عنوان از کابل استفاده نشده و تنها با موتورهای خطی و ایجاد محیط مغناطیسی کابین در مسیر تعیین شده به حرکت در می آید. به محض رسیدن کابین به مقصد، ریل ها می توانند تغییر جهت دهند و با این روش کابین مسیر و جهت حرکتی گیری را در ادامه طی کند. ThyssenKrupp امیدوار است که به زودی امکان افزایش تعداد شفت ها ایجاد شود. بدین طریق تنها با استفاده از نرم افزار و از راه دور مسیر حرکتی دلخواهی را برای کابین آسانسور می توان تعیین کرد. به گفته او در آسانسورهای فعلی تنها می توان، در بهترین حالت، هر کابین را با استفاده از کابل، تا ارتفاع ۱۶۰۰ پا بالا برد و برای افزایش طول مسیر، در برج های بلند، باید شفت ها و موتورهای بیشتری در طول مسیر کار گذاشت.

Multi، برندی که با این محصول جدید شناخته خواهد شد، می تواند بدون نیاز به ابزارهای اضافی و هدر دادن فضاهای زیاد، مسیرهایی با طول دلخواه را طی کند و همچنین محدودیت های سرعت، جهت و فضا را نیز نخواهد داشت. شرکت تولید ساختمان OVG در آلمان برای اولین بار این محصول را خریداری کرده و قرار است در برج در حال ساخت East Side بکار ببرد. هر چند این نشان دهنده اعتماد سازنده ها به این محصول است ولی علاوه بر نیاز به بررسی ها و آزمایش های بیشتر، هزینه های این آسانسور فعلا زیاد قابل توجیه نیست. به گفته سازنده Multi، هزینه این آسانسوها بطور متوسط ۵ برابر آسانسورهای فعالی خواهند بود که البته با تولید انبوه و افزایش کاربرد آنها و نیز مشارکت تولید کننده های بزرگ، این رقم به مرور کاهش خواهد یافت.

عملکرد درایو
درایو یا کنترل کننده دور موتور برای تنظیم دور الکتروموتورها استفاده می گردد. درایوها وظیفه کنترل دور موتور را بر عهده دارند. درایوها قادرند دور موتور را از صفر ار پی ام تا چند برابر دور نامی موتور و بطور پیوسته تغییر دهند. ساختار درایوهای الکتریکی این موتورها معمولا به این صورت است که: ۱ - ابتدا به کمک یک یکسو کننده (رکتیفایر) که میتواند بدون کنترل یا کنترل شده باشد خط سه فاز یا تک فاز تبدیل به یک ولتاژ dc میشود. ۲ - در مرحله بعد این ولتاژ dc به خوبی فیلتر شده تا هارمونیکها یا نوسانات اضافی حذف شوند. ۳ - در مرحله سوم به کمک یک پل سه فاز که از المانهایی مثل IGBT در آنها استفاده شده این ولتاژ DC سوئیچ میشود. روش سوئیچ به شکلهای مختلفی مثل PWM یا SPWM یا برداری است. ۴ - در آخرین مرحله که در یکسری از درایوها در نظر گرفته نمیشود این شکل موج شبه سینوسی فیلتر شده و هارمونیک های اضافی حذف میشوند. نکته: بعضی مواقع به اشتباه به درایو، اینورتر هم گفته میشود. گرچه کلمه inverter به معنی تبدیل کردن است، ولی از نظر علم الکترونیکی قدرت، اینورتر بیشتر به مداری گفته میشود که ولتاژ dc را به ac تبدیل میکند. پس کلمه drive برای این دستگاه کنترل موتور مناسبتر است. در واقع اینورتر بخشی از مدار یک درایو است و زیر مجموعه آن محسوب میشود.

- در درایو میتوان بر روی گشتاور مورد نیاز موتور کنترل داشت. در بعضی کاربردها نیازی نیست از تمام توان موتور استفاده کرد. درایو بر اساس نوع بار میتواند گشتاور مورد نیاز را تامین کند. - درایو میتواند دور بر دقیقه موتور را کنترل کند. سرعت موتور را در درایو میتوان به روشهای متخلف از روی پنل خود درایو یا خارج از درایو به صورت خیلی ساده با استفاده از پتانسیومتر کنترل کرد. - در درایو می توان زمان رسیدن به سرعت تعیین شده را کنترل کرد. مثلا موتور در ۱ ثانیه به دور ۱۰۰۰ rpm برسد. این کار را میتوان در stop کردن موتور نیز انجام داد مثلا در ۲ ثانیه موتور از ۱۰۰۰ rpm به دور صفر برسد و بایستد. - در درایو می توان تعیین کرد موتور در چه دوری چه گشتاوری داشته باشد و یا بالعکس در چه گشتاوری چه دوری داشته باشد. - در درایو میتوان تعیین کرد و دید که موتور چپ گرد شود یا راستگرد. - در درایو میتوان از موتور در برابر خطاهایی مثل اضافه بار محافظت کرد میتوان موتور را نرم راه اندازی کرد و نرم استاپ کرد. - بر روی جریان موتور در هر لحظه از دور و گشتاور میتوان کنترل و نظارت داشت و فرکانس کاری، ولتاژ کاری موتور و دور آن لحطه از کار موتور را دید.
