مقدمه
امروژه استفاده از توربین های بادی پیشرفته برای تولید برق در سراسر جهان
رو به گسترش است و یکی از سیاست های اصلی توسعه انرژی تجدیدپذیر را در
کشورهای پیشرفته به خود اختصاص می دهد. توربین بادی وسیله ای است که انرژی
نهفته در باد را دریافت کرده و بر اساس مکانیزمی که در آن تعبیه شده، انرژی
باد را به انرژی الکتریکی تبدیل می کند. توربین های بادی می توانند در
اندازه های مختلف و با ساختارهای گوناگون به صورت جدا یا در غالب مزرعه
بادی مورد بهره برداری قرار گیرند. از نظر سرعت عملکردی، آنها در سرعت ثابت
یا در سرعت متغیر کار می کنند. در ادامه با هر یک از ساختارها به صورت
مختصر آشنا می شویم.
توربین های بادی سرعت ثابت
در اوایل دهه 1990، توربین های بادی نصب شده استاندارد در سرعت ثابت کار می
کردند. این به معنی آن است که صرفنظر از سرعت باد، سرعت روتور توربین ثابت
است و بوسیله فرکانس شبکه توان، نسبت گیر و طراحی ژنراتور مشخص می شود.
مشخصه توربین هایی با سرعت ثابت این است که با یک ژنراتور القایی (قفسه
سنجابی یا روتور سیم بندی شده) تجهیز می شوند که به طور مستقیم با یک راه
انداز نرم و یک بانک خازنی که برای کاهش جبران توان راکتیو بکار می رود، به
شبکه متصل می شود. آنها برای بدست آوردن ماکزیمم بازده در یک سرعت بادی
خاص طراحی می شوند. برای افزایش تولید توان، ژنراتور مربوط به تعدادی از
توربین های سرعت ثابت دارای دو مجموعه سیم پیچی است: یکی در سرعت های بادی
پایین(معمولا 8 قطبه) و دیگری در سرعت های بادی متوسط و بالا (معمولاً 4 تا
6 قطب) استفاده می شود.
توربین بادی سرعت ثابت دارای مزیت ساده
بودن، مقاوم بودن و قابل اعتماد و اثبات شده می باشد و هزینه قسمتهای
الکتریکی آن پایین است. عیوب آن مصرف توان راکتیو غیر قابل کنترل، استرس
مکانیکی و کنترل محدود شده کیفیت توان است. بعلت عملکرد سرعت ثابت، همه
نوسانات در سرعت بادی بیشتر به صورت نوسانات در گشتاور مکانیکی و سپس به
صورت نوسانات در توان الکتریکی شبکه ظاهر می شود. در حالتی که شبکه ضعیف
وجود دارد، نوسانات توان می تواند همچنین منجر به نوسانات بزرگ ولتاژ شود
که به نوبه خود باعث تلفات قابل توجه خط می شود.
توربین های بادی سرعت متغیر
در طول چند سال گذشته توربین بادی سرعت متغیر نوع غالب در میان توربینهای
نصب شده بوده است. توربین های سرعت متغیر برای دست یابی به بازده
آیرودینامیکی ماکزیمم در طول یک رنج گسترده از سرعت های بادی طراحی می شود.
با یک عملکرد سرعت متغیر، تطبیق پیوسته (تسریع یا کاهش شتاب) سرعت چرخشی ω
توربین بادی تا سرعت باد ν ممکن شده است. به این طریق، نسبت سرعت نوک λ
(که λ برابر با ωR/ν می باشد که R شعاع روتور است) در یک مقدار پیش تعیین
شده که مربوط به ضریب توان ماکزیمم است، به صورت ثابت حفظ می شود. در تضاد
با سیستم سرعت ثابت، یک سیستم سرعت متغیر، گشتاور ژنراتور را ثابت نگه می
دارد و تغییرات در باد بوسیله تغییر در سرعت ژنراتور نمود پیدا می کند.
سیستم الکتریکی یک توربین بادی سرعت متغیر پیچیده تر از یک توربین بادی
سرعت ثابت است. معمولاً با یک ژنراتور سنکرون یا القایی تجهیز شده و از
طریق یک مبدل توان به شبکه متصل می شود. مبدل توان سرعت ژنراتور را کنترل
می کند؛ یعنی نوسانات توان ایجاد شده بوسیله تغییرات باد اساساً بوسیله
تغییرات در سرعت روتور و در نتیجه در سرعت روتور توربین نمود پیدا می
کند.مزیت های توربین های بادی سرعت متغیر، افزایش جذب انرژی، کیفیت توان
بهبودیافته و استرس مکانیکی کاهش یافته در توربین می باشند. عیب های آن
تلفات در اجزای الکترونیک قدرت، استفاده از تجهیزات بیشتر و هزینه افزایش
یافته تجهیزات بعلت الکترونیک قدرت می باشند.
در توربین بادی سرعت متغیر، می توان بسته به ترکیب موردنظر، چند نوع
ژنراتور را بکار برد و همچنین چند درجه آزادی در ترکیب نوع ژنراتور و نوع
مبدل توان وجود دارد که در ادامه به آن خواهیم پرداخت. اما قبل از آن بهتر
است نگاهی به انواع کنترل توان در سیستم توربین بادی داشته باشیم.
بررسی اجمالی مفهوم کنترل توان
همه توربین های بادی با چند نوع از کنترل توان طراحی می شوند. روش های
مختلفی برای کنترل نیروهای آیرودینامیکی در روتور توربین وجود دارد و
بنابراین در سرعت های خیلی زیاد باد، برای اجتناب از خرابی توربین می توان
توان را محدود کرد.
ساده ترین، مقاوم ترین و ارزان ترین روش کنترل، کنترل stall (کنترل پسیو یا
قطع) است که تیغه ها به توپی در زاویه ثابت جوش داده می شوند. طراحی
آیرودینامیک های روتور باعث می شود که روتور متوقف شود (از دست رفتن توان)
زمانی که سرعت های باد اضافه بر سطح معینی شود. بنابراین توان آیرودینامیکی
در تیغه ها محدود می شود. چنین تنظیم توان آیرودینامیکی آهسته باعث
نواسانات توان کمتر نسبت به تنظیم توان گام – سریع می شود. چند عیب روش،
بازده پایین تر در سرعت های بادی پایین، عدم وجود راه اندازی کمکی و
تغییرات در توان حالت ماندگار ماکزیمم بعلت تغییر در چگالی هوا و فرکانس
های شبکه می باشد.
نوع دیگر کنترل، کنترل گام (کنترل فعال) می باشد که تیغه ها می توانند به
ترتیب در خلاف جهت باد یا در جهت باد بچرخند، به صورتی که خروجی توان به
ترتیب خیلی زیاد یا خیلی کم می شود. به طور معمول، مزیت های این نوع
کنترل عبارتند از: کنترل توان خوب، راه اندازی پشتیبانی شده و توقف
اضطراری. از نقطه نظر الکتریکی، کنترل توان خوب به این معنی است که در
سرعتهای بالای باد، مقدار متوسط خروجی توان نزدیک به توان نامی ژنراتور
باقی می ماند. بعضی عیب های آن نیز عبارتند از: افزایش پیچیدگی اضافی
ناشی از مکانیزم گام و نوسانات بالاتر توان در سرعت های بالای باد. توان
لحظه ای به دلیل بادهای ناگهانی و سرعت محدودشده مکانیزم گام، در حدود
مقدار متوسط نامی توان نوسان می کند.
راه کار کنترل ممکن سوم، کنترل قطع فعال می باشد. همانطور که از اسم آن
مشخص است، فرآیند قطع تیغه به طور فعال توسط گام تیغه ها کنترل می شود.
در سرعتهای پایین باد، تیغه ها مشابه با توربین بادی گام کنترل شده، جهت
دستیابی به بازده ماکزیمم گام بندی شده هستند. در سرعتهای بالای باد تیغه
ها با مقدار کمی گام بندی شدگی در جهت مخالف با یک توربین کنترل شده با
گام به قطع عمیق تری حرکت می کنند. توربین بادی با روش کنترل قطع فعال
بدون نوسانات بالای توان که در توربین های گام کنترل شده وجود دارد، منجر
به توان محدودشده هموارتری می شود. این نوع کنترل دارای این مزیت است که
قادر به جبران تغییرات در چگالی هوا خواهد بود. در حالت ترکیب با مکانیزم
گام، انجام توقف های اضطراری و سپس راه اندازی توربین کار آسانتری خواهد
بود.
پیکربندیهای مختلف توربین بادی
در ادامه رایج ترین پیکربندی های توربین بکاررفته از نظر توانایی کنترل
سرعت و نوع کنترل قدرت طبقه بندی شده اند. اگر کنترل سرعت را به عنوان
معیار درنظر بگیریم، چهار نوع غالب و مختلف از توربین بادی وجود دارد که
عبارتند از:
نوع1: سرعت ثابت
نوع2: سرعت متغیر محدودشده
نوع 3: سرعت متغیر با مبدل فرکانسی مقیاس جزئی
نوع4: سرعت متغیر با مبدل فرکانسی در مقیاس کامل
در ادامه هر یک از پیکربندیها را مورد بررسی قرار می دهیم و مشخص می
کنیم که چه نوع کنترل سرعت و یا کنترل توانی برای آنها ممکن است و همچنین
در مورد مزیتها و معایب آنها بحث می کنیم.
نوع1: سرعت ثابت

شکل 1) پیکربندی توربین بادی نوع 1، در اینجا منظور از SCIG ژنراتور القایی قفسه سنجابی می باشد.
پیکربندی
فوق توربین بادی سرعت ثابت را با یک ژنراتور القایی قفسه سنجابی (SCIG)
نشان می دهد که از طریق یک ترانسفورماتور به طور مستقیم به شبکه متصل می
شود. چونکه SCIG همیشه توان راکتیو از شبکه می کشد، این پیکربندی از یک
بانک خازنی برای جبران توان راکتیو استفاده می کند. همچنین برای یک اتصال
نرم به شبکه از راه انداز نرم استفاده می شود.
صرفنظر از قاعده کنترل توان در یک توربین بادی سرعت ثابت، نوسانات باد به
نوسانات مکانیکی و در ادامه به نوسانات توان الکتریکی منجر می شود. در
حالتی که یک شبکه ضعیف وجود دارد، این می تواند منجر به نوسانات ولتاژ در
نقطه اتصال به شبکه شود. بعلت این نوسانات ولتاژی، توربین بادی سرعت ثابت
مقدارهای متغیر توان راکتیو را از شبکه توان می کشد (مگر اینکه بانک خازنی
وجود داشته باشد) که هر دوی نوسانات ولتاژ و تلفات توان را افزایش می
دهد. بنابراین عیب های اصلی این مورد آن است که از هیچ کنترل سرعتی
پشتیبانی نمی کند، به یک شبکه مقاوم احتیاج دارد و ساخت و ساز مکانیکی آن
باید قادر به تحمل استرسهای مکانیکی بالایی باشد.
این نوع توربین با هر سه نوع کنترل توان در صنعت توربین بادی مورد استفاده
قرار میگیرد که در ادامه به آنها خواهیم پرداخت.
کنترل قطع
این نوع کنترل توسط سازندگان دانمارکی توربین بادی در طول دهه 1980 و 1990
میلادی (برای توربین سه تیغه قطع تنظیم شده بالادستی) بکار برده شد. این
طرح بعلت قیمت نسبتاً پایین، سادگی و مقاومتش بسیار معروف شده بوده است.
توربین های بادی قطع کنترل شده نمی توانند راه اندازیهای پیوسته را
انجام دهند که به این معنی است که در طول اتصال پی در پی، توان توربین نمی
تواند کنترل شود.
کنترل گام
مزیتهای اصلی این نوع کنترل توربین این است که کنترل پذیری توان، راه
اندازی کنترل شده و توقفهای اضطراری را تسهیل می کند. عیب اصلی آن این
است که در سرعتهای بالای باد حتی تغییرات کوچک در سرعت بادی منجر به
تغییرات بزرگ در توان خروجی می شود. مکانیزم گام برای جلوگیری از چنین
نوسانات توانی به اندازه کافی سریع نمی باشد. تغییرات آهسته در باد می
تواند با گام بندی تیغه جبران شود اما در حالت تندبادها ممکن نیست.
کنترل
قطع فعال
این پیکربندی اساساً همه مشخصات کیفی سیستم قطع – تنظیم شده را حفظ می
کند. به عنوان نتیجه ای از بکارگیری کنترل قطع فعال، در استفاده بهتر از
سیستم کلی بهبودهایی وجود دارد. اتصال انعطاف پذیر تیغه ها به توپی
همچنین توقف اضطراری و راه اندازی را تسهیل می کند. عیبی که وجود دارد
قیمت بالاتر آن می باشد که به خاطر مکانیزم گام بندی و کنترل آن است.
مفهوم سرعت متغیر بوسیله هر سه پیکربندی دیگر بکاربرده می شود؛ اما بعلت
ملاحظات محدودیت توان امروزه فقط با مکانیزم کنترل گام سریع استفاده می
شود. بنابراین دو تکنیک کنترلی دیگر یعنی قطع و قطع فعال برای این سه
پیکربندی بکار نمی رود.
نوع2: سرعت متغیر محدودشده
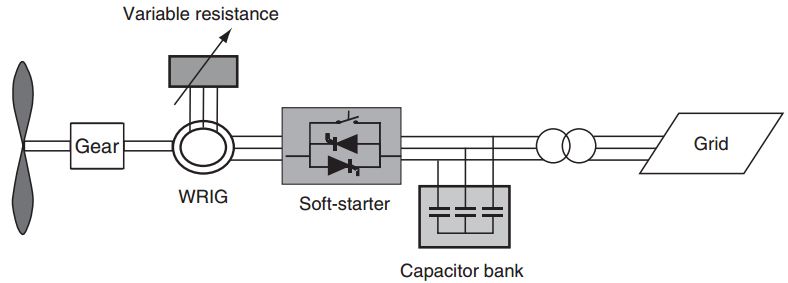
شکل 2) پیکربندی توربین بادی نوع 2، در اینجا منظور از WRIG ژنراتور القایی روتور سیم بندی شده می باشد.
پیکربندی فوق مربوط به توربین بادی سرعت متغیر محدودشده با مقاومت روتوری
متغیر ژنراتور می شود و از یک ژنراتور القایی روتور سیم بندی شده استفاده
می کند. ژنراتور همانند نوع 1 به طور مستقیم به شبکه متصل می شود. یک
بانک خازنی نیز جبران توان راکتیو را انجام می دهد. با استفاده از راه
انداز نرم نیز اتصالی همواری به شبکه بدست آورده می شود. ویژگی یکتای این
مورد آن است که یک مقاومت روتور اضافی متغیر دارد که میتواند بوسیله یک
مبدل کنترل شده به صورت بهینه تغییر داده شود که روی محور روتور قرار
گرفته است. بنابراین مقاومت روتوری کل قابل کنترل است. این اتصال بهینه
نیاز به رینگهای لغزشی پرهزینه را که احتیاج به جاروبکها و حفاظت دارد،
حذف می کند. مقاومت روتور می تواند تغییر داده شود و بنابراین لغزش را
کنترل می کند. با این روش توان خروجی در سیستم کنترل می شود. رنج کنترل
سرعت دینامیکی بستگی به اندازه مقاومت متغیر روتور دارد. به طور نمونه رنج
سرعت از 0 تا 10 درصد بالای سرعت سنکرون می باشد. انرژی حاصل از واحد
تبدیل توان خارجی بوسیله اتلاف گرمایی دمپ می شود.
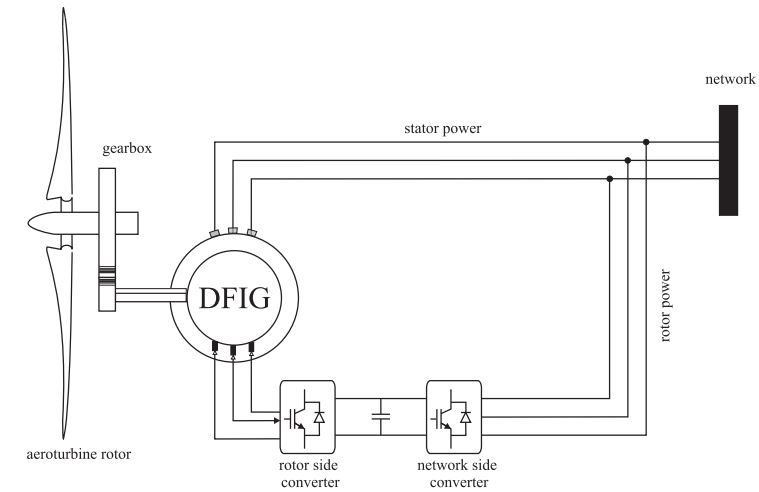
نوع 3: سرعت متغیر با مبدل فرکانسی مقیاس جزئی
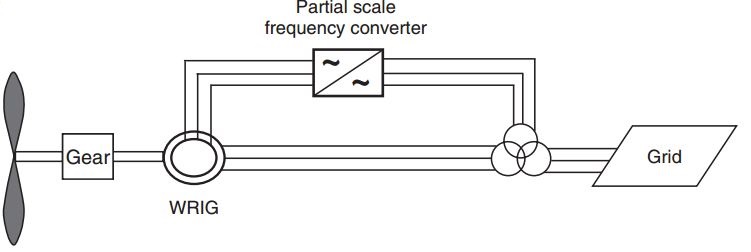
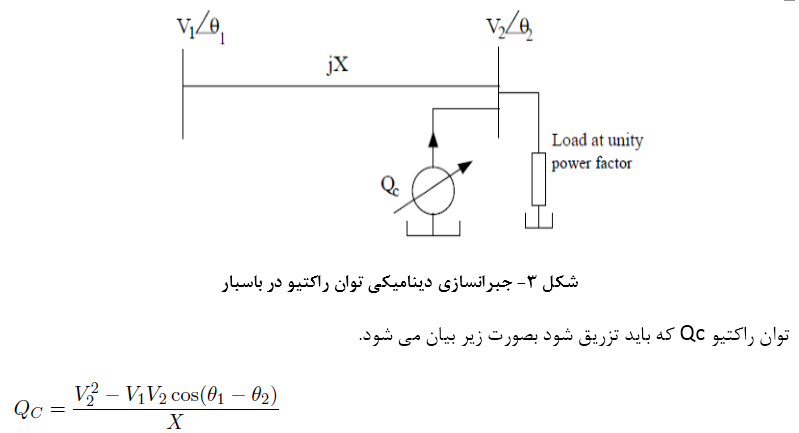
شکل 3) پیکربندی توربین بادی نوع 3، در اینجا منظور از WRIG ژنراتور القایی روتور سیم بندی شده می باشد.
این پیکربندی که با نام «ژنراتور القایی دوبل تغذیه (DFIG) شناخته» می
شود، دارای یک توربین بادی سرعت متغیر محدودشده با یک ژنراتور القایی روتور
سیم بندی شده (WRIG) و یک مبدل فرکانسی مقیاس جزئی (با مقدار نامی تقریبی
30 درصد از توان نامی ژنراتور) در مدار روتور می باشد. مبدل موردنظر
جبران توان راکتیو و اتصال هموارتر به شبکه را انجام می دهد. این نوع
سیستم توربین، دارای یک رنج گسترده تر از کنترل سرعت دینامیکی در مقایسه
با نوع 2 می باشد که بستگی به اندازه مبدل فرکانسی دارد. به طور معمول رنج
سرعت شامل 40- تا 30+ درصد سرعت سنکرون می باشد. عیبهای اصلی این
پیکربندی استفاده از رینگ های لغزش و احتیاج به حفاظت در حالت وقوع خطاهای
شبکه می باشد.
نوع4: سرعت متغیر با مبدل فرکانسی در مقیاس کامل

شکل 4) پیکربندی توربین بادی نوع 4، خط شکسته به طور گیربکس یعنی
پیکربندی می تواند شامل گیربکس باشد یا نباشد. در اینجا منظور از WRIG
ژنراتور القایی روتور سیم بندی شده، PMSG ژنراتور سنکرون مغناطیس دائم و
WRSG ژنراتور سنکرون روتور سیم بندی شده است.
این پیکربندی مربوط به توربین بادی سرعت متغیر کامل می باشد که ژنراتور آن
از طریق یک مبدل فرکانسی مقیاس کامل به شبکه متصل می شود. مبدل فرکانسی
جبران توان راکتیو و اتصال هموارتر به شبکه را ممکن می سازد. ژنراتور می
تواند به طور الکتریکی [با ساختار ژنراتور سنکرون روتور سیم بندی شده
(WRSG) یا (WRIG) ] یا با استفاده از آهنرباهای دائم [ با ساختار ژنراتور
سنکرون مغناطیس دائم (PMSG) ] تحریک شود. بعضی سیستم های توربین بادی سرعت
متغیر کامل گیربکس ندارند. در این حالتها یک ژنراتور چندقطبه هدایت شده
به صورت مستقیم با یک قطر بزرگتر استفاده می شود
جمعه 26 اسفند 1401 ساعت 15:01