ساز و کار ژنراتور القایی دوسو تغذیه
مقدمه:
امروزه پرکاربردترین ژنراتور جهت تولید برق از انرژی بادی ژنراتور القایی
دوسوتغذیه (DFIG) می باشد. این نوع ژنراتورها قابلیت کار با سرعت متغیر را
فراهم می کنند و مبدلهای بکار رفته در آن با درصد کمی از توان نامی توربین
بادی سر و کار دارند (حدود 30 درصد). ژنراتور القایی دوبل تغذیه از نوع
ژنراتور القایی سیم بندی شده است که هم استاتور و هم روتور آن دارای سیم
پیچی های سه فاز می باشند. علت نامگذاری این نوع ژنراتور به ژنراتور
القایی دوسوتغذیه، به خاطر انتقال الکتریکی تولیدی به شبکه از دو راه
استاتور و روتور می باشد.
شکل 1 یک توربین بادی سرعت متغیر مجهز به DFIG را نشان می دهد. در این شکل،
مدار روتور ماشین به دو مبدل و یک خازن لینک DC مجهز است. در این نوع از
ژنراتور القایی استاتور به طور مستقیم به شبکه متصل می شود در حالیکه سیم
پیچی روتور از طریق حلقه های لغزان به یک اینورتر متصل است. این اینورتر
به نحوی طراحی شده که ژنراتور القایی در یک رنج سرعت متغیر محدود شده عمل
کند. توجه می کنیم که این اینورتر خود جزئی از مبدل پشت به پشت (AC/DC/AC)
است.
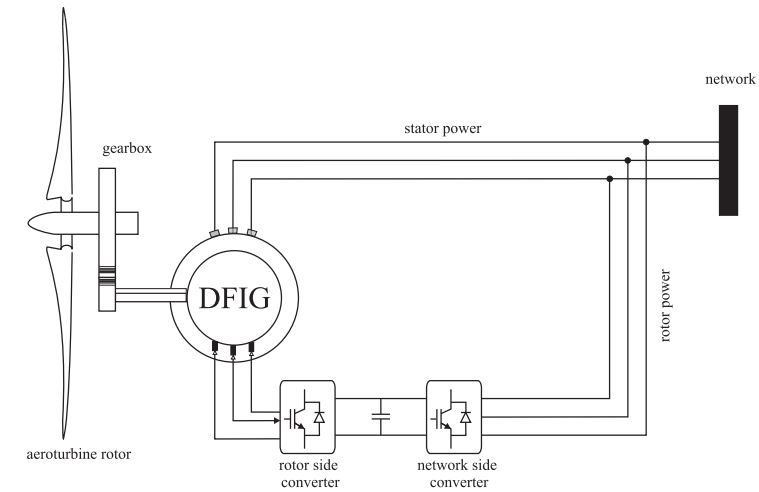
شکل 1) ژنراتور القایی دوبل تغذیه به همراه توربین بادی و مبدل پشت به پشت متصل به شبکه
مبدل
AC/DC/AC که بین سیم پیچهای روتور و شبکه قرارگرفته از دو مبدل منبع
ولتاژ VSC ، مبدل سمت روتور RSC و مبدل سمت شبکه GSC که به صورت پشت به پشت
به یکدیگر متصل اند تشکیل شده است. بین دو مبدل جهت برطرف کردن ریپل
ولتاژ و همچنین به منظور ذخیره انرژی از یک خازن استفاده می شود.
همچنین محور ژنراتور از طریق یک گیربکس به محور توربین بادی متصل است. نسبت
گیربکس به نحوی تنظیم می شود که سرعت نرمال ژنراتور القایی مطابق با
مقدار متوسط رنج سرعت روتور توربین بادی باشد. این کار برای مینیمم سازی
اندازه اینورتر انجام می شود که با رنج سرعت روتور تغییر خواهد کرد.
توربینهای
بادی انرژی جنبشی باد را به توان مکانیکی تبدیل می نمایند و این توان
مکانیکی از طریق شفت به ژنراتور انتقال پیدا کرده و در نهایت انرژی
الکتریکی تولید می شود. در این پست به طور مفصل در مورد پیشینه توربین صحبت
کردیم و در این پست نیز انواع پیکربندی توربین بادی و روشهای کنترل آن
را مورد بررسی قرار دادیم. به همین خاطر در اینجا از ذکر جزئیات در مورد
توربین خودداری کرده و شما را به صفحات مربوطه ارجاع می دهیم.
استفاده از ژنراتور القایی دوسو تغذیه به جای ژنراتورهای القایی در توربین بادی دارای مزایای زیر می باشد:
1.عملکرد با سرعت متغیر روتور در حالیکه فرکانس و دامنه ولتاژ تولید شده در مقدار ثابتی نگه داشته شده اند؛
2.بهینه سازی مقدار توان تولید شده به عنوان تابعی از مقدار باد در دسترس، نسبت به توان نامی خروجی ژنراتور؛
3.رفع مجازی تغییرات ناگهانی در گشتاور روتور و توان خروجی ژنراتور؛
4.تولید توان الکتریکی در سرعتهای پایین تر باد؛
5.کنترل ضریب توان (تولید توان راکتیو)
با توجه به توضیحات ارائه
شده و مزایای بیان شده در این نوشتار قصد داریم ضمن آشنایی با معادلات
ریاضی حاکم بر ساختار ، نحوه عملکرد و روش کنترل DFIG، یک شبیه سازی
کاربردی از آن را به همراه توربین بادی و مبدل پشت به پشت ارائه کرده و از
روش کنترل برداری کلاسیک برای کنترل مؤثر آن استفاده کنیم.
مدار معادل ژنراتور القایی دوسو تغذیه در چهارچوب مرجع سنکرون (dq)
معادلات ماشین الکتریکی در چهارچوب مرجع abc ارائه می شود اما معمولا برای
ساده سازی فرآیند کنترل این معادلات به چهارچوب های مرجع دیگری همچون
چهارچوب مرجع سنکرون یا چهارچوب مرجع ساکن منتقل می شود. در اینجا ما از
چهارچوب مرجع سنکرون یا dq0 استفاده می کنیم. بدین منظور می توان هر کدام
از بردارهای فضایی را بر اساس مؤلفه های افقی و عمودی آن بیان کرد. پس هر
کدام از سیم پیچی های فرضی توزیع شده روتور و استاتور را به صورت دو سیم
پیچ عمود بر هم همانند شکل 2 در نظر می گیریم:
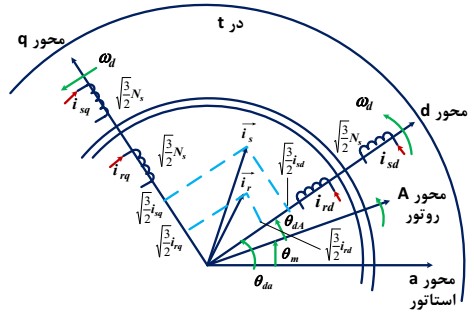
شکل 2) محورهای چرخشی استاتور و روتور در چهارچوب مرجع سنکرون
معادلات مربوط به جریانهای استاتور و روتور بر حسب جریان های سه فاز هر کدام به صورت زیر است:

در لحظه t ، محور d با زاویه θda نسبت به محور a استاتور قرار دارد.

روابط شار استاتور و روتور در چهارچوب مرجع dq به صورت زیر است:

که Ls اندوکتانس استاتور، Lr اندوکتانس روتور و Lm اندوکتانس مغناطیس
کنندگی است. معادلات ولتاژ استاتور و روتور در چهارچوب مرجع dq به صورت زیر
خواهد بود:

که Rs مقاومت استاتور، Rr مقاومت روتور، Lls اندوکتانس خودی استاتور، Llr اندوکتانس خودی روتور است. باید توجه داشت که:
همچنین در مورد پارامترهای سرعت خواهیم داشت:
که
ωd فرکانس زاویه ای سنکرون، ωm سرعت روتور بر حسب رادیان الکتریکی بر
ثانیه ، ωmech سرعت مکانیکی روتور بر حسب رادیان بر ثانیه و ωda فرکانس
زاویه ای لغزش است.
معادله مربوط به گشتاور از جمع گشتاورهای حاصل از محورهای d و q روتور حاصل
می شود:
که آنرا می توان به یکی از دو صورت زیر بدست آورد:
و معادله الکترودینامیکی ماشین القایی به صورت زیر نمایش داده می شود:
که J اینرسی معادل ژنراتور و B ضریب ویسکوز است. در نهایت مدار
معادل ماشین القایی در چهارچوب مرجع dq به صورت شکل 3 می باشد. در این شکل
همه متغیرها و پارامترهای الکتریکی به سمت استاتور رجوع داده شده اند.
توجه می کنیم که همه کمیتهای استاتور و روتور در چهارچوب مرجع چرخشی
سنکرون (چهارچوب dq ) هستند.

شکل 3) مدار معادل DFIG در چهارچوب مرجع سنکرون dq
مبدل پشت به پشت برای کنترل DFIG :
مبدل فوق از دو مبدل سمت روتور (RSC) و مبدل سمت شبکه (GSC) تشکیل شده که
از سمت DC توسط یک خازن به یکدیگر متصل هستند. وظیفه این مبدل، تبدیل
فرکانس می باشد؛ به طوریکه ولتاژ متناوب با فرکانس مشخص ابتدا به ولتاژ
مستقیم تبدیل شده و سپس مجدداً به ولتاژ متناوب با فرکانس مطلوب تبدیل می
گردد. با استفاده از روش کنترل مناسب، مبدل پشت به پشت قادر است تبدیل
فرکانس را از هر دو طرف انجام دهد.
دو مبدل فوق یکی به صورت اینورتر و دیگری به صورت یکسو کننده عمل می کند
که توسط یک لینک DC بهم متصل هستند. مبدلی که به ژنراتور متصل است، مبدل
سمت روتور (RSC) و مبدلی که به شبکه متصل است، مبدل سمت شبکه (GSC) نامیده
می شود. هر یک از این دو مبدل سه فاز، می تواند دو نقش یکسوسازی و
اینورتری را انجام دهد.
هنگامی که سرعت ژنراتور کمتر از سرعت سنکرون است، جریان توان از سمت شبکه
به سمت روتور می باشد و لذا GSC نقش یکسوکننده و RSC نقش اینورتر را ایفا
می کند. در شرایطی که سرعت ژنراتور بیشتر از سرعت سنکرون است، جریان توان
از سمت روتور به سمت شبکه می باشد و لذا RSC نقش یکسو کننده و GSC نقش
اینورتر را ایفا می کند. نحوه عملکرد سیستم و کنترل پالسهای اینورترها
توسط سیستم کنترلی اصلی مجموعه انجام می شود.
مدل توربین بادی مبتنی بر DFIG
مدل ژنراتور القایی دوبل تغذیه شامل قسمتهای مکانیکی، الکتریکی و مبدل
همراه با کنترل کننده است که در مجموع انرژی مکانیکی را از باد به انرژی
الکتریکی تبدیل می کند و سپس آن را به شبکه توان تزریق می کند.
الف)
مدل قسمت مکانیکی
قسمت مکانیکی DFIG شامل تجهیزاتی است که در معرض تیغه های توربین بادی و
مکانیزم فیزیکی آن قرار دارند و آن را هدایت می کنند (قطار درایو یا
گیربکس). با حضور باد با سرعت Vw، توان مکانیکی Pm تولید می شود که روتور
ژنراتور را هدایت میکند. قسمت مکانیکی می تواند بوسیله معادلات زیر شرح
داده شود:
![]()
که Tm گشتاور مکانیکی، چگالی هوا، A مساحت جاروب شده توسط تیغه توربین در
زمانی است که می چرخد و Cp ضریب توان مکانیکی است که می تواند به صورت
زیر محاسبه شود:
که λ نسبت رأس تیغه، R شعاع تیغه، λr متغیر مربوط به نوک تیغه میانی، ß
زاویه گام تیغه توربین و مقدارهای Ci (i=1:8 ) ثابتهای توربین هستند.
قانون علامت به گونه ای اتخاذ می شود که وقتی DFIG در حال تولید برق به
شبکه است (یعنی مد ژنراتوری) ، Tm منفی است، در حالیکه زمانی که آن توان
مصرف می کند (مد موتوری) Tm مثبت است.
با درنظر گرفتن یک مدل دو جرمه از قطار درایو، معادله زیر رابطه بین سرعت
روتور ، گشتاور مکانیکی Tm و گشتاور الکتریکی Te را نشان می دهد که مقدار
گشتاور الکتریکی در قسمت مربوط به بخش الکتریکی معرفی و محاسبه خواهد شد:
که
H اینرسی ژنراتور و F ضریب ویسکوز است. کنترل کننده زاویه گام همچنین بر
اساس سرعت روتور جهت حفاظت از گیرهای انتقال و ژنراتور القایی در نظر گرفته
می شود. یک کنترل کننده تناسبی برای زاویه گام در نظر گرفته می شود که
به صورت زیر است:
که ωd سرعت زاویه ای بیشینه است.
ب) قسمت الکتریکی
قسمت الکتریکی DFIG اساسا از ژنراتور القایی تشکیل شده است که توان
الکتریکی Pe و گشتاور الکتریکی Te در آن از تبدیل توان مکانیکی بدست می
آیند که آن نیز از توان بادی در مکانیزم توربین بادی استخراج می شود.
معادلات مربوط به قسمت الکتریکی و مدار معادل قبلا برای این قسمت توضیح
داده شده است.
قبل از پرداختن به قست کنترل مبدل ها، بهتر است به بررسی مختصر انواع روش
های کنترل DFIG بپردازیم.
روش های کنترلی DFIG :
سیستم کنترلی به همراه مدولاتور وظیفه تولید پالس کلیدهای مبدل مطابق با
مرجع مطلوب را بر عهده دارد. سه مورد از پرکاربردترین روشهای کنترل DFIG
شامل کنترل جهت دهی میدان (FOC)، کنترل مستقیم گشتاور (DTC) و کنترل
مستقیم توان (DPC) می شود.
روش مرسوم و کلاسیک کنترل برداری توانایی کنترل مستقل توان اکتیو و راکتیو
ژنراتور را فراهم می کند. این شیوه کنترلی بر پایه متغیرها در دستگاه مرجع
سنکرون است. روش کنترل برداری بر اساس تبدیل مدل سه فاز موتور القایی به
مدل دو سیم پیچ عمود بر هم و کنترل جریان این دو سیم پیچی بنا شده است.
این تبدیل به صورت تبدیل مدل سه فاز به مدل دو فاز dg دوار است. می توان
با جهت دهی مناسب شار، گشتاور را با مؤلفه عمودی جریان استاتور در دستگاه
dq یعنی iqs و مقدار شار را با مؤلفه افقی جریان استاتور در دستگاه dq ،
یعنی ids کنترل کرد. در قسمت شبیه سازی از روش کنترل جهت یابی میدان برای
فرآیند کنترل استفاده شده است.
کنترل مبدل ها
قسمت کنترل کننده – مبدل DFIG شامل کنترل کننده سمت روتور (RSC) و کنترل
کننده سمت شبکه (GSC) هستند که هر یک از تعدادی کنترل کننده PI تشکیل شده
و از طریق یک خازنی که لینک DC نامیده می شود، به هم وصل شده اند. در
حقیقت مبدلهای فرکانسی با مقادیر نامی کامل برای اتصال AC/DC/AC
ژنراتورهای توربین بادی به شبکه توان در این مکانیزم حضور دارند که تبدیل
سرعت را از سرعت روتور توربین بادی به فرکانس نامی شبکه بین گیربکس و مبدل
فرکانسی تسهیم می کنند. این منجر به کاهش تلفات کلی توان ایجاد شده با
تبدیل سرعت مکانیکی می شود. هدف GSC حفظ ولتاژ لینک DC در یک مقدار ثابت
صرفنظر از دامنه و جهت توان روتور است.
برای ایجاد کنترل مستقل توان اکتیو و راکتیو شارش شده بین شبکه و GSC، این
طرح کنترلی در چهارچوب مرجع ولتاژ استاتور انجام می شود. از طرف دیگر RSC
در چهارچوب شار متقابل برای بدست آوردن کنترل توان اکتیو و راکتیو می
باشد.
هدف کنترل توان این است که توان مکانیکی تولید شده توسط
توربین، مشخصه توان – سرعت خودش را دنبال کند و کنترل توان راکتیو بوسیله
تنظیم جریان راکتیو شارش شده در RSC بدست می آید. قانون تبدیل انرژی با
معادله زیر برای لینک DC ارائه می شود:
کنترل مبدل سمت
روتور:
این مبدل برای کنترل گشتاور DFIG از کنترل مستقیم جریان روتور استفاده می
کند. RSC این کار را با اعمال ولتاژ مناسب به سیم پیچ روتور انجام می دهد.
RSC تحت فرکانس های متغیر متناظر با تغییرات سرعت روتور که متناسب با
سرعت باد است، عمل می کند تا حداکثر توان از باد استحصال شود. همچنین در
عملکرد عادی، RSC توان راکتیو را برای روتور فراهم و بدین ترتیب ضریب توان
شبکه را کنترل می کند. این توان راکتیو باید از طریق استاتور که به شبکه
متصل است، فراهم گردد.
مبدل سمت روتور می تواند از یکی از کنترل کننده های گشتاور، سرعت و یا
کنترل کننده توان راکتیو برای تنظیم توان خروجی DFIG استفاده کند. به طور
معمول از یک کنترل کننده PI برای کنترل گشتاور، سرعت و یا توان استفاده می
شود. هر کدام از کنترل کننده ها که استفاده شود، می تواند خروجی مقدار
مرجع جریان روتور، گشتاور توان و سرعت خواسته شده را فراهم کند. سپس از یک
کنترل کننده PI دیگر برای کنترل خطای جریان روتور از مقدار مرجع استفاده
می شود. جریان روتور همچنین می تواند برای کنترل توان راکتیو تولیدی
ژنراتور استفاده شود. طرح کنترل RSC در روش کنترل برداری مرسوم در شکل 4
نمایش داده شده است. طرح کنترلی RSC در چهارچوب شار متقابل برای بدست
آوردن کنترل توان اکتیو و راکتیو می باشد.
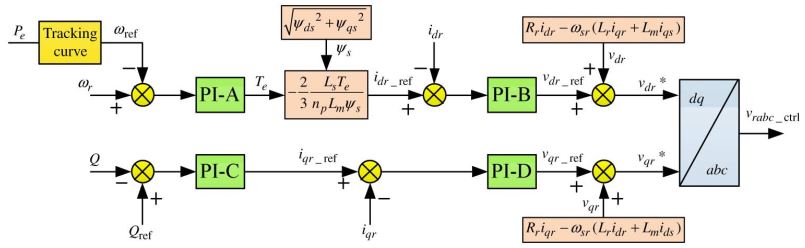
شکل 4) کنترل برداری مبدل سمت روتور یا RSC
در شکل 4، در حالت عملکرد نرمال، کنترل کننده RSC برای کنترل سرعت روتور و
خروجی توان راکتیو استفاده شده است. در اینجا مرجع توان راکتیو به مقدار
صفر تنظیم می شود به نحوی که خروجی توان راکتیو واقعی ژنراتور به مقدار
صفر کنترل شود. به عبارت دیگر ژنراتور توان راکتیو را نه از سیستم جذب کرده
و نه به سیستم تحویل می دهد.
کنترل مبدل سمت شبکه
این مبدل برای تنظیم کردن ولتاژ خط DC بین دو مبدل استفاده می شود. در
طول عملکرد عادی، GSC ولتاژ خط DC بین دو مبدل را با متعادل کردن توان
راکتیو در هر دو مبدل کنترل می کند. همچنین GSC قادر است توان تزریقی به
شبکه را به منظور کنترل ولتاژ شبکه کنترل نماید. این مزیت در هنگام رخدادن
خطا و پایداری ولتاژ شبکه مورد توجه قرار می گیرد.
GSC شامل یک حلقه کنترل بیرونی است که ولتاژ خط DC را کنترل می کند و تلاش
می کند تا آن در مقدار نامی نگه دارد. یک حلقه کنترل PI داخلی نیز جریان
GSC را کنترل می کند. از آنجایی که GSC به طور مستقیم به شبکه وصل می شود
توان خروجی آن باید تحت یک فرکانس ثابت متناظر با فرکانس شبکه باشد. طرح
کنترل GSC در روش کنترل برداری مرسوم در شکل 5 نمایش داده شده است. طرح
کنترلی GSC در چهارچوب مرجع ولتاژ استاتور انجام می شود.
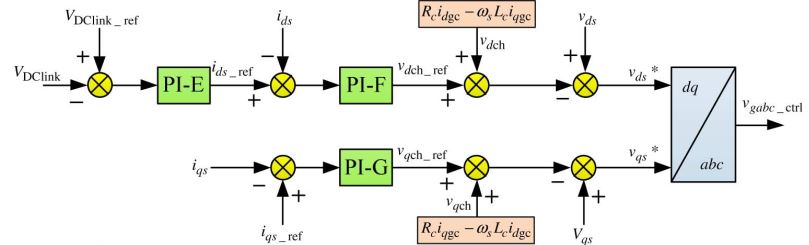
شکل 5) کنترل برداری مبدل سمت شبکه یا GSC
کنترل کننده گام
کنترل کننده گام برای تنظیم سرعت در ناحیه عملکردی با بار کامل استفاده
می شود. بالای سرعت نامی باد، توان خروجی تنظیم شده فقط متناسب با سرعت
روتور تغییر می کند، چون گشتاور ثابت باقی می ماند، بنابراین تنظیم توان
به طور کامل وابسته به تنظیم سرعت است.
هدف کنترل زاویه گام بهینه سازی استخراج توان از توربین بادی و همچنین
جلوگیری از تولید توان اضافه بر نامی در سرعت باد قوی است. طرح کنترل در
شکل 6 نمایش داده شده است:
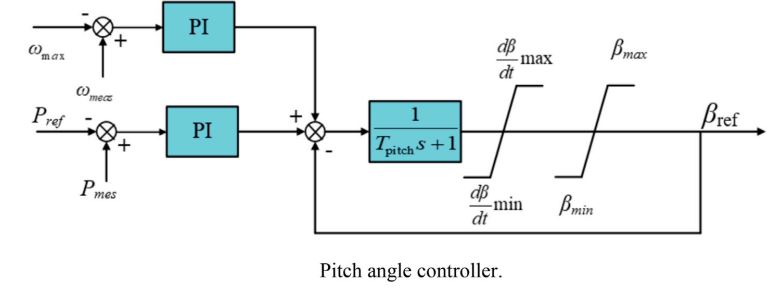
شکل 6) کنترل زاویه گام برای ژنراتور القایی دوبل تغذیه
این کنترل کننده از سه بخش تشکیل شده است:
کنترل سرعت گام
این قسمت مربوط به کنترل سرعت بوده و به کمک کنترل کننده PI انجام می شود.
جبرانگر
گام
این قسمت مربوط به کنترل توان اکتیو بوده و به کمک کنترل کننده PI انجام می
شود.
محرک گام
این قسمت نقش فیلترینگ، محدودسازی دامنه و نرخ تغییر و همچنین تثبیت گام
را انجام می دهد.
شبیه سازی و کنترل یک ژنراتور القایی دوبل تغذیه
در این قسمت یک ژنراتور القایی دوبل تغذیه با توان مکانیکی 1.5 مگاوات و
ولتاژ 400 ولت در نظر گرفته شده و فرآیند کنترل مؤثر آن در سیمولینک متلب
انجام شده است. پیکربندی ژنراتور به همراه توربین بادی، مبدلها، خازن لینک
DC، فیلترها و مدل شبکه توان در شکل 7 نشان داده شده است. توجه می کنیم
که اتصال سیستم توان بوسیله منبع ولتاژ سه فاز انجام می شود که با امپدانس
معادل تونن سری شده است.
یک فیلتر سلفی – مقاومتی اتصال مبدل شبکه را به نقطه اتصال مشترک برقرار
می کند. همچنین یک فیلتر خازنی نیز به صورت موازی بین نقطه اتصال مشترک و
منبع توان جهت کاهش هارمونیک ها متصل است.
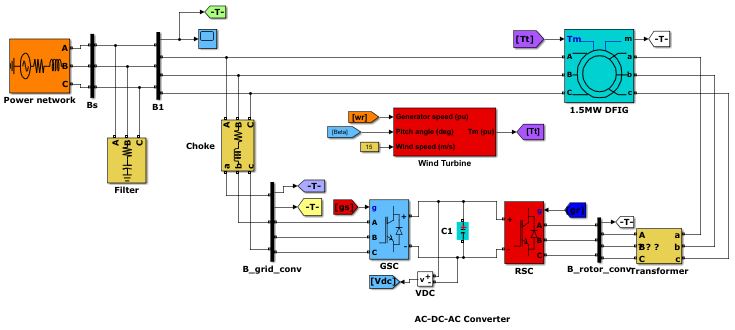
شکل 7) سیستم DFIG به همراه توربین بادی و مبدل AC/DC/AC
جزء مهم شبیه سازی سیستم کنترل آن می باشد که نمای کلی بلوک آن در شکل 8 نمایش داده شده است. کنترل کلی سیستم شامل بخشهای زیر است:
1)کنترل مبدل سمت شبکه
2) کنترل مبدل سمت روتور
3) کنترل زاویه گام توربین
توضیحات مربوط به هر یک از این قسمت ها
در بخش های قبل ارائه شده است. خروجی بلوک کنترل کلی سیگنالهای گیت برای
تحریک کلیدهای دو مبدل به صورت جداگانه و همچنین زاویه گام مناسب برای بلوک
توربین بادی است.
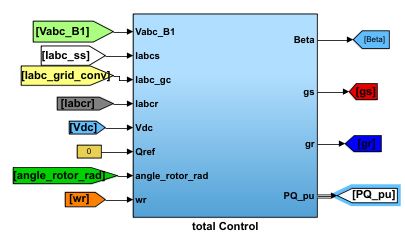
شکل 7) کنترل کلی سیستم شامل کنترل مبدل ها و زاویه گام توربین
مسئله مهم در کنار مدلینگ صحیح سیستم کنترل، تنظیم پارامترهای کنترل کننده
ها می باشد. در سیستم کنترل در مجموع 7 کنترل کننده وجود دارد که به
تعداد 6 تا از آنها از نوع تناسبی – انتگرالی و کنترل کننده دیگر از نوع
تناسبی است. این کنترل کننده ها به روش سعی و خطا در این شبیه سازی تنظیم
شده است.
بعد از تنظیم کنترل کننده ها به سراغ ران شبیه سازی و بدست آوردن نتایج
می رویم. زمان شبیه سازی در اینجا 3 ثانیه تنظیم شده است که در طی آن فرض
شده است که سرعت باد برابر با مقدار ثابت 15 متر بر ثانیه باشد. مقدار
مرجع توان راکتیو و مقدار مؤلفه جریان در راستای محور q برای مبدل سمت شبکه
برابر با صفر تنظیم شده است. در ادامه تعدادی از نتایج شبیه سازی ارائه
شده است.
در شکل 8 تغییرات توان اکتیو و راکتیو مبادله شده در نقطه اتصال مشترک
ارائه شده است. همان طور که مشخص است توان اکتیو در نهایت در مقدار حدودی
1.5 مگاوات به حالت ماندگار خود می رسد. از طرفی توان راکتیو نیز مرجع خود
را که مقدار صفر است، به خوبی دنبال می کند.

شکل 8) تغییرات توان اکتیو و توان راکتیو مبادله شده در نقطه اتصال مشترک
در شکل 9 تغییرات ولتاژ لینک DC و سرعت مکانیکی پریونیتی روتور ارائه شده
است. از نمودار اول مشخص است که تثبیت ولتاژ در مقدار 1150 ولت که مقدار
مرجع تنظیم شده در شبیه سازی بوده، به خوبی انجام شده است. همچنین از
نمودار دوم مشخص است که سرعت روتور بعد از کمی نوسان به مقدار ماندگار می
رسد. دلیل اینکه مقدار پریونیتی سرعت بیشتر از یک است به این خاطر است که
سرعت مرجع باد مقدار 15 متر بر ثانیه می باشد که از مقدار سرعت نامی
ژنراتور یعنی 11 متر بر ثانیه بیشتر است.

شکل 9) تغییرات ولتاژ لینک DC و سرعت پریونیتی محور روتور
در شکل 10 مشخصه ولتاژها و جریانهای سه فاز در نقطه اتصال مشترک در حالت
ماندگار ارائه شده است. با توجه به نمودار اول پیک ولتاژ در حالت ماندگار
به مقدار 565 ولت میرسد.

شکل 10) ولتاژها و جریان سه فاز در نقطه اتصال به شبکه (حالت ماندگار)